谘詢電話
ENGLISH0755-88840386SimotionD在五伺服枕式包裝機中的應用
發布時間:2020-08-20 09:06:30 |來源:網絡轉載
0引言
枕式包裝機是食品、醫藥等包裝行業中應用非常廣泛的一種包裝機械,是一種以運動控製為主導的機器。傳統的枕式包裝機主要采用差速齒輪箱結構,優點是運行穩定,缺點是噪音較大,機械部分容易損壞,封裝規格的調整及包裝尺寸的調整十分麻煩。隨著計算機技術、傳感器技術的發展,PLC技術日益成熟,應用越來越廣泛。包裝機的主機係統開始采用PLC和伺服控製器作為控製係統核心,可以使包裝速度高、定位準確,且係統更加穩定可靠。然而傳統的電機驅動器提供了豐富的運動控製功能,但邏輯控製和複雜運算功能卻比較弱,而普通的PLC提供了全麵的邏輯控製功能,但又很難具備運動控製的全部功能。因此PLC和伺服控製器配合使用的方式存在高速數據傳輸、數據同步和精確控製等方麵的問題。西門子新一代的運動控製平台SimotionD是為以運動控製起主導作用的機器而設計的,本身集成了邏輯控製與運動控製,可以獨立完成以往PLC加電機調速器的所有功能,可以實現由一個開發環境解決所有運動控製、邏輯及工藝的控製問題,並且它還能夠提供所有必要的工具,從編程到參數設定,從測試到故障診斷。因此基於SimotionD控製係統的包裝機可以大大提高生產效率。
.1係統總體結構設計
係統的硬件總體結構框圖如圖1所示。
其中變頻器通過RS485232轉換後與上位機通信,用來控製吸氣或吹氣的強度,這由生產工藝
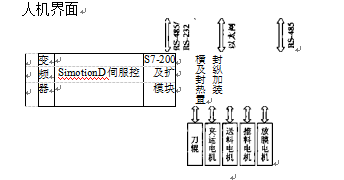
圖1硬件總體結構框圖
決定;S7-200PLC及擴展模塊通過RS485與上位機通信用來控製橫封及縱封裝置的溫度。此控製係統的核心是SimotionD4250SimotionD425.是新一代的運動控製器,可以控製1到16個電機軸,通過DRIVE-CLiQ接口與Sinamics驅動模塊進行數據交換,在此係統中它通過以太網接口與上位機通信,其突出優點有: •
(1)強大的工程設計,組態及平台SimotionScout,可以實現工藝參數及曲線的實時跟蹤(TraceandMeasurement),便於調試及進行故障診斷,並可以對參數進行驗證和優化。
(2)相對獨立的背板散熱和電路板保護塗層,可以保證電氣櫃的高防護等級,滿足惡劣環境對電氣設備的要求:長期,穩定和小維護量。
(3)主動前端技術和電能回饋技術。主動前端(ActiveFrontEnd)技術保證了直流母線的電壓,防止電網電壓的波動對連續生產產生影響。而電能回饋技術保證了係統的四象限運行,使係統更加節能。
(4)極高的調速精度,Sinamics係列伺服驅動可以實現壓頻(VF)控製,矢量控製(VectorCon-血1),伺服控製(ServeControl),頻率輸出精度達0.01%,保證了調速的精確性和穩定性。
2係統組成
枕式包裝機要完成成型、定位和封口等功能,主要包括以下幾個係統部分;
- 電氣控製係統。電源采用三相380V50Hz供電,主機的電氣係統主要由伺服係統、PLC、變頻器、人機界麵等組成。並在橫封刀軸、夾運鏈條、推板鏈條及送料鏈條上分別安裝一個接近開關,位置為係統的零點;在送膜軸上安裝一個光電開關用來檢測色標。-'
- 封切係統。枕式包裝機的封切係統由橫封(上、下)和縱封(左右兩個)組成,其作用就是對包裝物品進行橫向和縱向的封裝。
- 加熱係統。係統需要對橫封刀和縱封刀進行加熱,並進行溫度控製,采用熱電耦采集並控製封切刀的溫度,由PLC進行控製。
- 伺服係統。此係統需要對五台電機進行速度、位置的精確控製,其速度決定該包裝機的包裝速度。
.(5)縱封送料係統。縱封送料係統由伺服驅動送料輻,與橫切送料係統配合,根據包裝膜的袋長等技術指標達到準確送膜並封切(橫切到包裝膜的色標位置)的要求。係統結構如圖2所示。
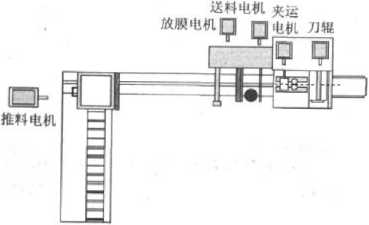
圖2係統結構示意圖
3軟件設計
本係統軟件在SimotionSCOUTV4.0平台下編寫,運動控製程序用MCC語言編寫,通信部分程序用ST(StructuredText)語言編寫,程序的執行有以下特點:
(1)執行係統中的BackgroudTask任務被操作係統周期調用,其作用相當於PLC中的0B1。
(2)TechnologicalFaultTask任務是當係統中岀現報警時被調用,PerihperalFaultTask在外部IO出錯時被調用,如果這兩個任務沒有程序,係統將停機,所以將一個空程序分配給這兩個任務。
(3)MotionTask啟動一個運動任務,如定位等,MotionTask與BackgroundTask不同,MotionTask被調用後隻執行一次,該任務可以使用等待指令在執行中無限期等待,但執行完後不會自動再次執行。
(4)BackgroundTask任務中不能使用等待指令,否則BackgroundTask運行超時會造成係統死機。
SimotionD下位機以Udp子程序接收主機的命令,解析並根據讀寫命令實現與SimotionD數據的交互。編程思路以流程圖方式說明,如圖3所示。
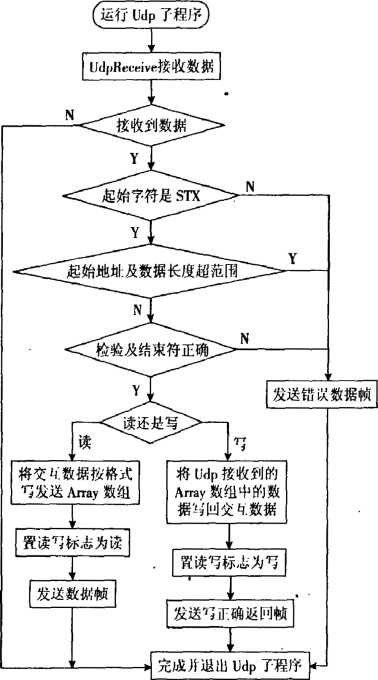
圖3上位機與SimotionW25的通信流程圖
以下為ST語言編寫的數據接收檢査並發送數據的部分通信程序主要代碼:
VAR
i:INT;
END.VAR
nArrayRWLen:=512;數組長度
nError:=0;〃默認nError=0bWrilenag:=FALSE;〃默認為讀數據nEtxCoimt:=8;Default
,myStructRetUdpReceive;=_udpReceive(port:=3000
,communicationMode:=DO_NOT_CLOSE_ON_EXrT
,nextCommand:=IMMEDIATELY
,receiveVariable:=buffer
);
〃數據接收檢査並發送數據到上位機
IFmyStructRetUdpReceive.funcdonResult=0THEN
IFmyStructRetUdpReceive,dataLength=2THENdataOK
tmpByte:=bufiferfO];STXBYTE_TOJNT(bufifer[1]);
IFtmpByte=2THENI.FiratisSTX(02)nCommand:=buffer[1];ReadorWritetmpWord:=buffer]2]*256+buffer[3];nStartAddress:=WORD_TO_INT(tmpWord);tnipWord:=buffer]4]*256+bufferf5];nDataLen:=WORD_TO_INT(tmpWord);tmplnt:=nStartAddress+nDataLen; '
IFtmplnt>nAirayRWl.cnTHEN2.TheLenofDataiso ver
nError:=3;DataLenError
ELSE
IFnCommand=49THENWrite
nEtxCount:=8+nDataLen;
ENDJF;
tmpByte;=buffer[nEtxCount];ETX
IFtmpByte=3THENETXSuccess
nError:=0;
EI5E
nError:=4;ETXError
END_IF;
END_IF;2.TheLenofDataisover
ELSE
nError:=1;STXError
END.IF;I.FimtisSTX(02)END
NoError,ThenHMItoReadandWriteData
IFnError=0THEN
buffer[0]:=2;STX'
IFnCommand=48THENHMIReadreadanaytobuff
er
nWriteFlag:=FALSERead
FORi:=:1TOnDataLenDObuffer[i]:=byteArray[i+nStartAddressT];END_FOR;
buffer[nDataLen+1]:=0;
buffer[nDataLen+2]:=0;
buffer]nDataLen+3]:=3;ETX
nSendLen:=nDataLen+3;
ELSE
IFnCommand=49THEN寫緩衝數據到數組nWriteFlag:=TRUE;HMIWritetoArray.
FORi;=1TOnDataLenDObyteArray[i+nStartAd-dress-1]:=buffer[i+5];END.FOR;
buffer[O]:=6;確認字符0x06
nSendLen:=1;
ELSE
nError:=2;命令錯誤
buffer[0]:=21;〃非應答0x15nSendLen:=1;
ENDJF;
ENDJF;
ELSESendErrorNAK
buffer[0]:=21;〃非應答0x15
nSendLen:=1;
ENDJF;
完成上位機讀寫數據
'發送數據到上位機
tmpDint:=.udpSend(sourcePort:=3000
,destinationAddress:=myStnictRetUdpReceive.wurceAddress
,destinationport:=myStructRetUdpReceive.source Port
,communicationMode:=CLOSE_ON_EXITDO_NOT_CLOSE_ON_EXITCLOSE_ON_EXIT
.dataLength:=INT_TO_UINT(nSendLen)+1,data:=buffer .
);
ENDJF;數據接收,檢査並發送數據到上位機完畢
數據讀寫測試
IFnWriteFlag=TRUETHENHMIWritetoArray
“讀寫標誌”默認為讀,Simotion主程序每次判斷“讀寫標誌”,如果為讀標誌則將要讀取的相關數據寫入交互數據數組的相應位置。
當Udp子程序判斷命令為寫,將數據寫入交互數據數組,並將“讀寫標誌”置為寫標誌後,主程序判斷“讀寫標誌”為寫後,將交互數據數組的數據寫入相應的數據區,然後將“讀寫標誌”置為讀標誌(這樣保證隻寫一次)。
4結束語
本係統與傳統包裝機相比省去了大量的齒輪箱結構,改進了傳統包裝機噪音大、機械容易損壞、封裝精度低、包裝尺寸規格的調整十分麻煩的缺點。經過調試,效果良好,本係統已經在國內食品生產企業應用,並出口到多個國家地區。
文章來源於網絡轉載,侵刪
- 上一篇:新型盒式氣調包裝機的設計
- 下一篇:煙草包裝機分度機構的動靜比研究
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器