谘詢電話
ENGLISH0755-88840386智能稱量係統與死區 PID 控製在燒結配料中的應用
發布時間:2021-06-15 17:29:26 |來源:網絡轉載
根據燒結生產過程的要求和燒結礦質量的要求,精確配料是十分重要的。 燒結生產實踐證明,配料發生偏差是影響燒結過程正常進行和燒結礦產質量的重要因素。如:固體燃料配入量波動 0.2%,會使燒結礦的強度和還原性受到影響,燒結礦的含鐵量和堿度波動就會影響高爐爐溫和造渣製度,嚴重時,會引發高爐懸料、崩料現象。本文著重介紹燒結配料係統運用智能稱量係統與帶死區 PID 控製算法來實現精確配料的控製過程。
1 係統控製概述
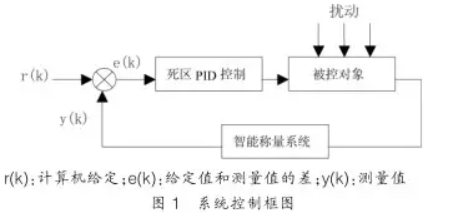
燒結配料控製以智能稱量係統的物料K8凯发登录入口檢測為基礎。將檢測的物料K8凯发登录入口傳送給 PLC , 在 PLC 中經過 PID 的調節運算,並根據配比值給出各寬帶和螺旋給料機的電機控製頻率並輸出給變頻器,通過變頻器來控製寬帶和螺旋給料機的電機速度,從而控製物料的K8凯发登录入口變化。其框圖如圖 1 。
2 智能稱量係統
2.1 智能稱量係統拓樸結構
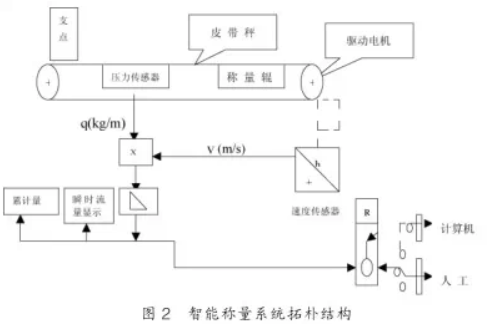
本文所述燒結配料係統是由 13 個寬帶和 2 個螺旋給料機構成。要確保燒結配料成分的穩定, 13 個寬帶和 2 個螺旋的K8凯发登录入口控製是關鍵。 在K8凯发登录入口的采集上配料係統使用了拉姆齊公司的XR-2105P 型K8凯发登录入口控製儀。我們知道,當輸送機輸送物料時,測量皮帶稱上每單位長度的載荷值 q ( kg/m )與皮帶在同一時刻的運行速度 V ( m/s )相乘,所得結果即物料的瞬時K8凯发登录入口: q · v ( kg/s )。因物料輸送的不均勻性和皮帶速度隨時間的變化, 所以在 T 時間間隔的累積K8凯发登录入口可以用以下積分式表示: W=q ( t ) V ( t ) dt 。式中: W-T 時間間隔內所輸送物料的累計量 ( kg 或 t ); T- 物料通過稱的時間( s 或 h ); q ( t ) -皮帶單位長度上的物料重量( kg/m或 t/m ); V ( t ) -物料在皮帶上的運行速度( m/s )。從式中可以看出,隻要保證 q ( t )· V ( t )的乘積不變,就可以保證物料K8凯发登录入口的恒定, 即隨皮帶上物料重量的變化控製皮帶運行速度做出相應的調整,就可以保證物料K8凯发登录入口的恒定。 在本係統中皮帶秤的速度是恒定不可調的, 所以要控製K8凯发登录入口的恒定隻能調節皮帶上物料重量,而重量的改變又隻能通過改變變頻器的頻率,以求改變寬帶和螺旋下料的速度。
2.2 變頻器 MB+ 網絡控製
每次在變頻器上電前或故障後,首先進行初始化,該部分的控製程序由 PLC 完成,其程序框圖如圖 3 。
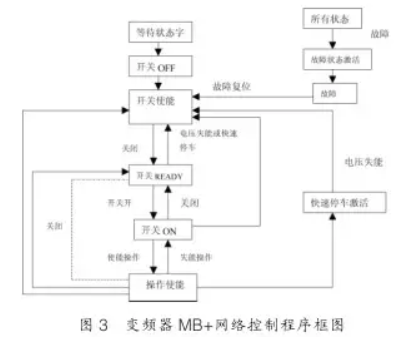
13 個寬帶和 2 個螺旋調節給料用變頻器由通信卡接入MB+ 網,在每台變頻器的擴展卡上設置硬件節點地址,設定通信協議、方式及接受和發送的字節數;同時定義 PLC 內的通信協議、方式及接受和發送的字節數。 PLC 內使用 PEER COP 向變頻器“ WRITE ”命令,包括啟停操作、電機正反轉控製、過程調節控製、故障控製等;用GLOBAL 向變頻器“ READ ”狀態,包括電流、電壓、轉速等信息,了解變頻器及電機的運行狀態。
3 給料 PID 調節控製
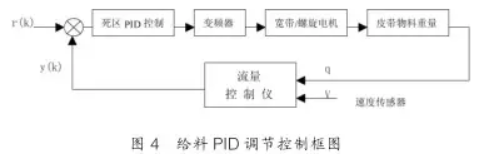
給料 PID 調節主要通過變頻器調節寬帶或螺旋電機轉速,以改變下料量。傳統的 PID 控製方法是無法達到穩度、精度要求的。因此采取帶死區的 PID 控製來避免控製作用過於頻繁,消除由於頻繁動作及現場振動所引起的振蕩係統超調,造成下料量不穩定。 控製原理是,物料的瞬時K8凯发登录入口反饋值 y(k)[q · v ( kg/s ) ]與計算機給定值 r(k) 進行比較,再通過 PLC 裏的帶死區的 PI 調節,由變頻器控製寬帶或螺旋的速度,來達到穩定物料的要求。其控製框圖如圖4。
3.1 帶死區 PID 控製算法原理
帶死區的 PID 控製算式為:
式中,e(k) 為位置跟蹤偏差,e(k)=r(k)-y(k), r(k)為計算機給定量,y(k)瞬時K8凯发登录入口反饋值; e0是一個可調參數,其具體數據可根據實際控製對象的工藝要求或實際經驗確定。 若e0 值太小,會使控製動作過於頻繁,達不到穩定被控對象的目的;若e0太大,則係統將產生較大的滯後, 係統的快速性下降而達不到工藝要求。 帶死區的控製係統實際上是一個非線性係統,當|e(k)|≤|e0|時,數字調節器輸出為零;當|e(k)|≥|e0|時,數字輸出調節器有PID 輸出。
注意:在實際應用中,帶死區的 PID 控製器通過 PLC 內建軟模塊實現。
3.2 控製特點
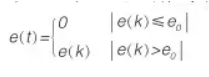
在此係統控製中,在同一幹擾信號作用下,對傳統 PID 控製器和帶死區的 PID 控製器進行仿真。
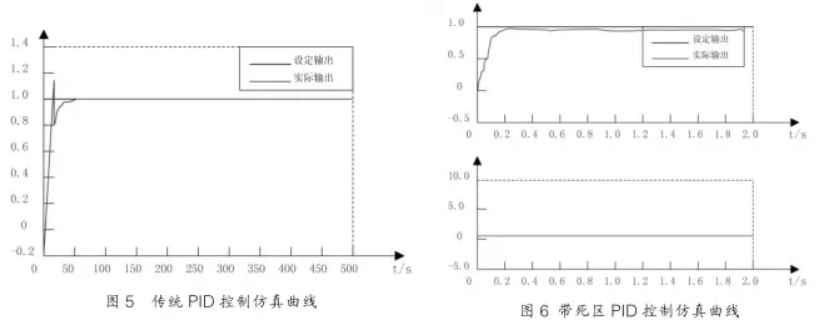
從仿真結果來看,帶死區 PID 調節比傳統的 PID 調節具有良好的響應速度,能夠對現場造成的波動實行快速的調整,但是其不足的地方仍然存在靜差, 但是這個靜差是完全在工藝要求範圍內;而傳統的 PID 調節不僅有 20% 左右的超調,而且係統響應相對較慢這樣一但遇到波動就會造成配料不均勻以至造成燒結礦質量下降。
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:一種定量自動稱重控製器的設計與實現
- 下一篇:性能優越的電磁振動給料機控製器
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器