谘詢電話
ENGLISH0755-88840386全自動碼垛機的應用
發布時間:2021-03-19 15:43:22 |來源:網絡轉載
20世紀60年代,意大利、日本等國相繼研製出半自動、全自動碼垛機,通過不斷改進,已廣泛用於石油化工粉粒產品、化肥、糧食、食品、飲料、藥品、水泥等袋裝和箱裝物料的碼垛作業。
我國碼垛機從1980年左右起步,之後逐漸在糧食和油脂加工廠得到應用。碼垛機根據用途和使用場所不同可分為多種結構形式,這裏就橋式(旋轉式)碼垛機、機器人碼垛機和高位全自動碼垛機的工作原理、結構特點和配置情況作一介紹,供同行參考。
1橋式碼垛機
豆粕庫中豆粕包和豆皮包可以通過打包線輸送帶直接裝車,也可以從地麵包堆裝車,倉容一般較大(有5000,6000.8000t和11000t),這樣的規模人工碼垛和發貨無法作業,為了在包裝粕庫碼垛和直接裝車,房式倉一般采用橋式碼垛機進行碼垛作業。
一般房式倉的設計堆包高度為5.5m,庫房簷高大於8.5m,庫房立柱兩側設牛腿及橫梁,橫梁規格為36號工字鋼。在立柱兩側牛腿上安裝碼垛機軌道,安裝高度6.8m,碼垛機上方安裝高位輻式輸送機。輸送帶和行車軌道沿牆設置,沿兩側軌道縱向設置行車,從灌裝線下來的粕包淨重分別為60kg和50kg,輸送帶輸送粕包速度為300包/h,沿牆輸送帶送到縱向行車軌道,然後從下滑道送至接包麵板進行堆包。在縱向行車軌道和滑道連接處如做成旋轉式,下滑道可以旋轉,向三個方向堆包,所有控製按鈕集中在接包麵板的一側。
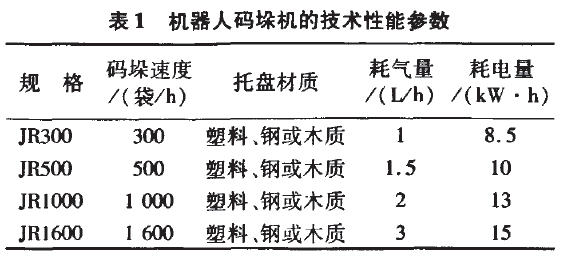
2機器人碼垛機
機器人碼垛機是一種仿真人操作、自動操作、重複編程、在三維空間完成規定作業的設備,包括抓起和放置係統,能從一個或多個地點抓起一個或多個紙箱,然後將它們放置到貨盤上預先設置好的地點。基本的計算能力及可集成傳感器用以識別產品的變化,使機器人碼垛機成為一個智能係統,能識別和區分出多種產品。一般來說,機器人碼垛機要比傳統碼垛機慢,因為它們一次可能隻抓取一個箱子,或是要同時發揮多個功能,因而處理速度變慢。一般來說,機器人碼垛機的速度在每分鍾15~30個箱或包之間。
所有的機器人碼垛機,如果所安裝的機械臂不一樣,它們的碼垛定位也是不一樣的。較小或較輕的產品一般采用具有多軸能力的關節杆。較重的產品則要采用大型臂或台架式臂,但這兩類機械臂的移動軸數比較有限。
2.1主要機構
機器人碼垛機主要由機械主體、伺服驅動係統、手臂機構、末端執行器(抓手)、末端執行器調節機構以及檢測機構組成,按不同的物料包裝、堆垛順序、層數等要求進行參數設置,實現不同類型包裝物料的碼垛作業。按功能劃分為進袋、轉向、排袋、編組、抓袋碼垛、托盤庫、托盤輸送以及相應的控製係統等機構。
(1)進袋機構。采用皮帶輸送機完成碼垛機供袋任務。
(2)轉向機構。按設定程序對包裝袋作轉向編排。
(3)排袋機構。釆用皮帶輸送機將編排好的包裝袋送至積袋機構。
(4)積袋機構。采用皮帶輸送機集中編排好的包裝袋。
(5)抓袋碼垛機構。采用機器人碼垛機構完成
碼垛作業。 .,
(6)托盤庫。成疊的托盤由叉車送入,按程序逐個排放至托盤輾道輸送機,有規律地向碼垛工序供應空托盤,達到8層後的成垛托盤,由輾道輸送機輸送至成垛托盤庫,最後由叉車取出送至倉庫貯存,係統采用可編程序控製器(PLC)控製。
2.2控製係統
我們曾使用過的機器人碼垛機采用西門子ES7-226PLC進行控製,用西門子觸摸屏對畫麵進行組態,通過和PLC的數據通訊,來控製和顯示碼垛自動循環全過程。
電氣控製係統有以下特點:當碼垛機用於包裝、碼垛生產時,可用其自動控製係統根據需要使其處於“自動”或“手動”狀態。當設備出現電機過載、岀垛積壓、夾包、空托盤不到位等任何一種故障時,碼垛機將停機或聲光報警,具有自動化保護功能。消除異常後,能重新在原停機狀態下恢複運行。當碼垛機停機、停電時,可由PLC保持原運行狀態,避免重複記憶。
2.3工作過程
由包裝線上送來的包裝袋,其封口處於包裝袋前進方向的末端。第1隻包裝袋不旋轉直接進入排包工序,第2隻包裝袋做180。旋轉後進入排包工序,然後由排包機將第1、2隻包裝袋推至碼包工序,第3、4、5隻包裝袋依次在旋轉機上做逆時針旋轉90。,然後由排包機推至碼包工序;同時將先期進入碼包區域的第1、2隻包裝袋一起推送至卸包台工作區域;由卸包機將編碼好的一層包裝袋卸入事先備好的托盤上進行分層碼垛;此時承載托盤下降一層包裝袋高度的行程,至此完成第I層的碼垛工作。後麵第3、5、7層的碼垛均按上述程序運行。第2層包裝袋的運行程序為:當第2層的第6、7、8隻包裝袋依次進入旋轉機後,在旋轉機上做順時針方向旋轉90。,並送至排包工序,然後由排包機將排列好的3隻包裝袋推送至碼包工序,第9隻包裝袋不用旋轉直接進入排包工序,第10隻包裝袋在旋轉機上做180。旋轉後進入排包工序,由排包機推進至碼包工序,將先期進入碼包區域的第6、7、8這3隻包裝袋編碼在一起,然後將第2層編碼好的5隻包裝袋一起推送至卸包台工作區域,由卸包機將這5隻包裝袋卸在第1層上麵進行碼垛;承載托盤再下降一層包裝袋的高程,至此完成第2層的碼垛工作。後麵第4、6、8層的碼垛程序,均按上述程序運作。
2.4主要技術性能及特點
(1)機器人碼垛機結構簡單實用。整機結構設計簡單、合理、實用,占地麵積小,與傳統碼垛機相比可節省廠房麵積1/3左右,碼垛能力可達600~800袋/h。
(2)自動化水平高。從進袋、轉向、編碼直到碼垛全過程,可實現全自動連續運行。該機除具有正常開停車功能外,同時還具有自診、報警、打印、通信、故障連鎖等功能,並留有與中央控製室通信的軟件和接口。
(3)操作運行平穩可靠。采用低慣量、大功率.運行方法,使操作運行平穩可靠,性能良好,並可提高設備元器件的使用壽命。控製係統主要元件與敏感元件采用日本OMRON和FUJI公司產品,氣動係統主要元件釆用日本SMC產品。
(4)部件采用高強度輕質合金,強度高。機械設備使用壽命可達15年左右。
(5)設有碼垛機自身和周圍人身安全保護裝置,以保證安全生產。
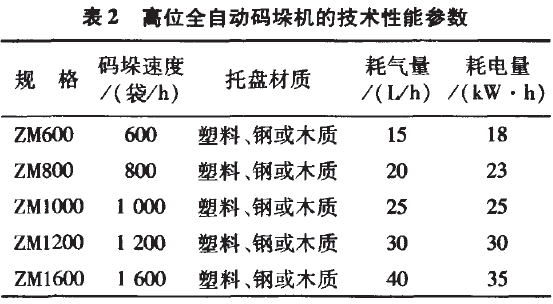
3高位全自動碼垛機
高位全自動碼垛機由匯總輸送機、斜坡輸送機、轉位機、編組機、分層機、升降機、托盤倉、托盤輸送機、垛盤輸送機及高架平台等組成。
高位全自動碼垛機是在貨盤上方的一定高度或水平上接收需要碼垛產品的。空白貨盤從一個料倉或是積聚站下到碼垛機,機器將貨盤撐開並且定位在一個托盤之下;產品裝入托盤,並且組合成一層或一列;碼垛機輕輕地將已經組合好的產品層或產品列放置到位於它們下麵的貨盤上;隨後碼垛機繼續組合第二層產品,改變紙箱的排列格式與貨盤格式相匹配,有的時候層與層之間會插入一片紙板用來將上下層隔開;之後,貨盤和第1層產品會往下降一層,這樣第2層產品就可以放置到第1層產品上。貨盤不斷下降,一層接一層的產品不斷碼高直到完成指定數量;碼好的貨盤隨後緩慢降落到地麵水平,傳送機或是叉車負責將它們運送到其他捆紮或是拉伸裹包等工作台,然後運輸出廠。
4碼垛機前麵配置的設備
碼垛機是應用在大型散裝貨倉庫後麵裝包出貨的,碼垛機前麵配置有定量打包機、金屬檢測器和重量檢測器等設備。
4.1定量打包機
人工將包裝袋擺放在供袋盤上,然後抓袋器把包裝袋定位在包裝機的下料口上,電子定量秤內放出的物料通過過渡料鬥進入包裝袋並傳送到立袋輸送機上,再由夾口整形機、折邊和縫口機完成整形、折邊和縫口,然後由倒袋機將其放倒,經金屬檢測器、重量檢測器檢測後,在揀選機上剔除不合格產品並統計合格產品的有關數據,經過中間運輸皮帶後進入碼垛過程。
4.2金屬檢測器
料袋通過金屬檢測器時,若料袋中不含金屬顆粒和金屬顆粒較小時,該檢測器不發出任何信號,料袋被送到下一道丁序;當料袋含有金屬顆粒大於或等於2mm時,金屬檢測器通過電控係統發出信號,該料袋在揀選機上被剔除。
4.3重量檢測器
重量檢測器由光電開關I、II控製,當料袋進入該裝置時,光電開關I被料袋遮擋;當料袋被完全載於秤體上時,光電開關II被遮擋,係統通過壓力傳感器開始采集數據直至複檢結束;若重量合格(測量精度10g,動態),包裝袋進入下道工序;重量超差的包裝袋,係統發出報警信號,該包裝袋進入揀選機時將其剔除。
5結束語
碼垛機的故障率極低。在糧油加工廠,碼垛機被用於粕庫堆包和油瓶箱堆包及上車等工序。碼垛機在正常運行時,進包、轉包、排包、推包、編碼、卸包、空托盤輸入、承載托盤輸出等工序均按設定的程序進行,並有顯示信號,操作人員僅做監護即可。
由於采用了旋轉機構、雙向開啟的卸包台及自動對中等機構,垛層編碼合理、包裝袋封口朝裏,使垛形四周整齊,具有較高的碼垛質量。
碼垛機替代人力勞動,節省碼垛成本和管理成本,使倉庫堆包現場井然有序,改善了勞動環境,提升了企業形象。
但是,碼垛機還需要不斷改進,如紙箱、包裝袋或單位級別產品的組織性能還需進一步改進。目前的配送和供給鏈越來越複雜,速度越來越快,碼垛機麵臨的挑戰主要在產品處理和配送的新方法方麵。
本文源於網絡轉載,如有侵權,請聯係刪除
深圳市k8凯发版官网儀器有限公司是一家專門從事稱重儀表和全自動包裝碼垛生產線的研發及生產的高新技術企業,所生產的JY500係列稱重顯示控製器(包括配料秤儀表、皮帶秤儀表、包裝秤儀表、重量變送器等)高速高精度,使用壽命長。k8凯发版官网儀器有十數年的現場校驗經驗,在業內有良好的口碑,且有專門的售後工程師幫忙解決產品使用過程中遇到的技術問題,客戶可以放心省心順心的使用我司的產品。如果對我司的產品感興趣,歡迎谘詢。
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器