谘詢電話
ENGLISH0755-88840386基於模糊控製的皮帶給料式定量包裝秤優化控製研究
發布時間:2020-09-24 11:04:31 |來源:網絡轉載
0引言
隨著經濟的發展,對於皮帶給料式定量包裝秤的需求不斷增加眾多學者對其進行了相關研究,文獻[2]提出了一種三級給料控製的方法,減小了稱重誤差,但難以同時滿足計量精度與計量速度的要求,且適應性差。文獻[3]在變頻調速的基礎上加入模糊PID控製器,增強了係統穩定性,提高了係統的計量速度與精度,但仍無法滿足適應性的要求。文獻[4]提岀了一種基於誤差自動修正的控製算法,對誤差進行在線修正,有效地改善了係統性能,但該算法在連續工作情況下才能保證較好的效果,且動穩態性能較差。
為了進一步提高皮帶給料式定量包裝秤的性能,本文在多級給料方式的基礎上,設計了一種基於模糊控製算法⑶的定量包裝秤模糊控製器,並將其與異步電機模糊自適應PID⑹矢量控製調速係統相結合,構成定量包裝秤模糊矢量控製係統,從而提高其動穩態性能,增強其對多種物料多種定量的適應性,解決計量速度與精度的矛盾。通過仿真分析證明了該方法的合理性與有效性。
1皮帶給料式定量包裝秤稱重係統
1.1係統的組成
皮帶給料式定量包裝秤稱重係統的結構如圖1所示。
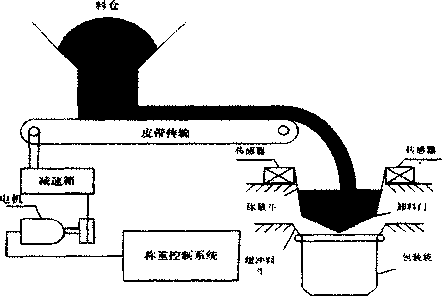
圖1皮帶給料式定量包裝秤稱重係統結構圖
皮帶傳輸機構、異步電機和減速箱構成皮帶給料機。包裝袋和夾帶裝置構成了稱重容器,稱重控製係統是整個係統的核心。自動運行過程為:稱重控製係統檢測到上袋信號後,夾袋裝置夾緊包裝袋,然後啟動電機,通過調節電機的轉速來控製給料速度。當物料重量達到設定值時,給料裝置停止給料,打開卸料門,物料放完後自動關閉卸料門。如此循環往複自動運行。
1.2動態稱重模型及誤差分析
稱重係統模型如圖2所示,稱重部分和稱重傳感器可以等效為一個二階係統。對其進行受力分析可知,在動態稱重過程中,物料重量G。)和物料下落的衝擊力F。)隨物料下落而改變,稱重模型隨時間變化,此時稱重係統為時變線性係統。
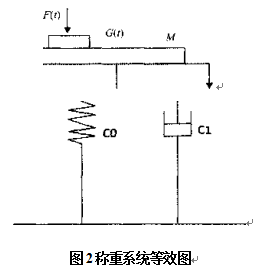
圖2稱重係統等效圖
造成動態稱重係統不能及時稱量出物料重量的主要原因有兩個:一是物料下落產生衝擊力,使得稱量值大於實際物料重量;二是存在空中落料差,由於這部分物料存在滯後性,導致稱量值小於實際物料重量。在給料過程中,當落差高度&和K8凯发登录入口係數c(C等於皮帶上物料橫截麵積s和物料密度P的乘積)一定時,降低給料機的轉速n(t),可減小稱量誤差,但同時降低了計量速度。好的動態稱重係統,關鍵是保證稱重速度的同時,具有高的稱重精度。本文釆用三級給料方式,為保證稱量精確度,要求中速和慢速給料存在穩定段,且末級穩定給料時間t>丿瓦布,h,為中速給料切換到慢速給料時的落差高度。所以保證計量精度的前提下提高計量速度就必須縮短各級給料的過渡時間。
2模糊控製器設計
模糊控製器是模糊控製係統的核心,由輸入量模糊化接口、數據庫、規則庫、推理機、輸出量解模糊接口組成。
2.1模糊自適應PID速度調節器設計
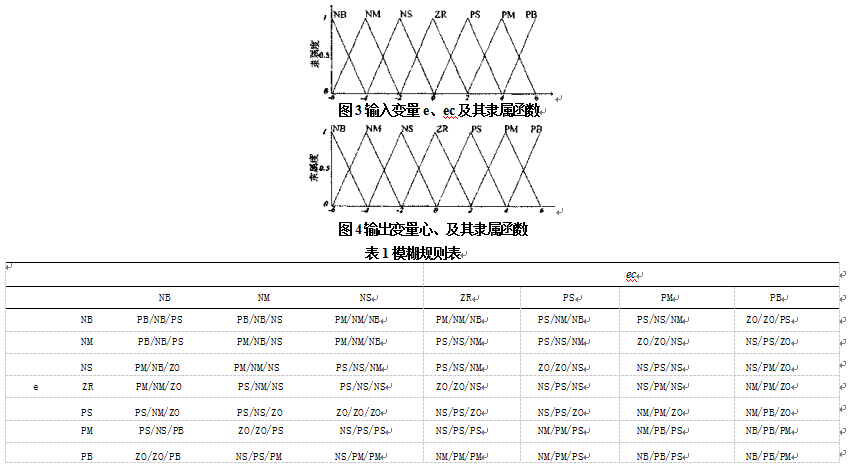
如圖3、圖4所示,速度調節器本質上是一個PID控製的轉差調節器,為了提高係統的魯棒性、適應性以及動靜態性能,本文結合模糊控製對比例係數kp、積分係數k,和微分係數kd進行在線整定。模糊控製器的輸入量為轉速偏差e和偏差變化率ec,輸出量為PID調節器參數增量Akp仏傷。偏差e和偏差變化率ec的隸屬函數如圖3所示,圖4為輸出量△如、弘,、△奶的隸屬函數。根據操作經驗和實驗分析獲得推理規則如表1所示(分別為庇Wd)。
2.2定量包裝秤模糊控製器設計
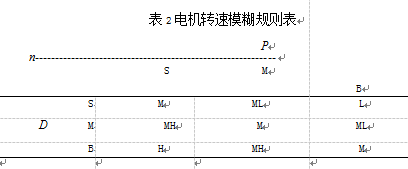
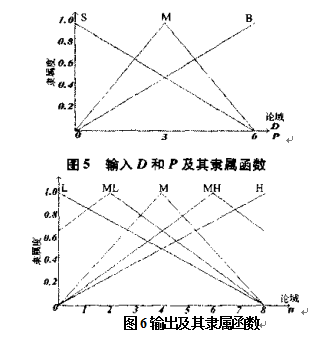
根據物料密度、K8凯发登录入口和給料皮帶轉速之間存在的模糊關係,設計了一個模糊控製器,通過物料密度P和目標定量值。得到給料皮帶的轉速",從而調節物料K8凯发登录入口Qo增強了定量包裝秤的適應性,且在保證稱量精度前提下提高了定量包裝的速度。本設計方案中語言變量P的基本論域為[0.3g/cm,35g/cm,jD
的基本論域為[0.5kg,50kg]的基本論域為[5rad/s,76.5
rad/s],輸入輸出量采用均勻量化形式。其中輸入D和P的隸屬函數如圖5所示,圖6為輸出n的隸屬函數。通過查閱相關資料,總結模糊推理規則如表2所示。
3控製係統MATLAB仿真
3.1仿真模型的建立
為了驗證該方法的正確性,本文用MATLAB搭建仿真模型進行驗證。係統采用三級給料方式,給料過程中S幾乎不變,為了方便計算認為S等於0.01m2,皮帶與電機轉速之比v為0.04。所選電機參數如下:額定電壓380V,額定功率15kW,額定頻率50Hz,額定轉速730r/min,定子電阻0.332Q,轉子電阻0.153Q,定轉子漏感1mH,互感31.5mH,4對極,轉動慣量0.15kg•m2。
3.2仿真結果及分析
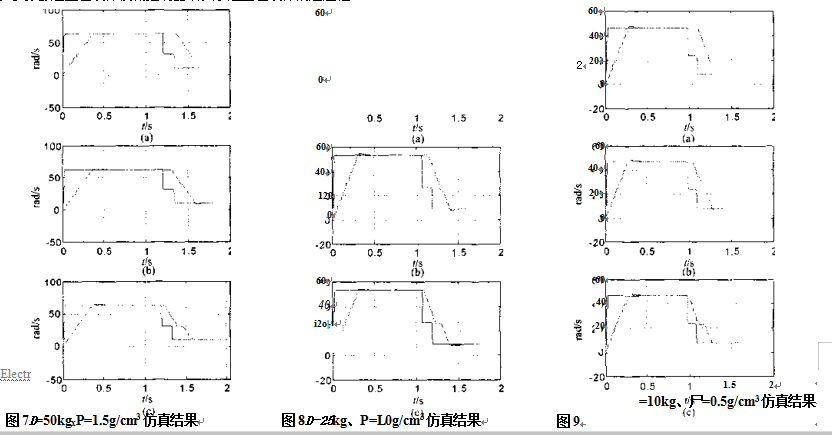
本文將定量包裝秤模糊控製器分別與模糊自適應PID和常規PID速度調節器調速給料係統相結合進行了仿真實驗。仿真結果如下圖,圖(a)/(b)/(c)中模糊自適應PID調速給料係統均釆用快速給料至0.9、中速給料至0.95D、慢速加料至D,常規PID調速給料係統分別釆用快速給料至0.9/0.85/0.8〃、中速給料至0.95/0.95/0.92D、慢速加料至D。
D=50kg且P=1.5g/cn?時,由圖7可知,與模糊自適應PID速度調節器相結合的控製係統響應速度快,動穩定性高,存在中速和慢速給料穩定段,且末級給料穩定時間滿足要求,既保證了計量精度又提高了計量速度。與常規PID速度調節器相結合的控製係統響應速度慢,動穩定性差,不能同時滿足計量精度和速度的要求。
D=25kg且P=l.0^cm3時,由圖8可知,與模糊自適應PID速度調節器相結合的控製係統響應速度快,動穩定性高,存在中速和慢速給料穩定段,且末級給料穩定時間滿足稱重要求,在保證計量精度的前提下縮短了給料時間。與常規PID速度調節器相結合的控製係統響應速度慢,動穩定性差,不能同時滿足計量精度和計量速度的要求。與圖7相比改變D與P後,定量包裝秤模糊控製器相應地改變了各級給料速度。
D=10kg且P=Q.5g/cm3時,由圖9可知,與模糊自適應PID速度調節器相結合的控製係統響應速度快,動穩定性高,存在中速和慢速給料穩定段,且末級給料穩定時間滿足稱重要求,在保證計量精度的前提下縮短了給料時間。與常規PID速度調節器相結合的控製係統響應速度慢,動穩定性差,仍不能同時滿足計量精度和計量速度的要求。與圖7和8相比改變。與P後,定量包裝秤模糊控製器相應地改變了各級給料速度。由此可見,定量包裝秤模糊控製器增強了定量包裝秤的適應性。
4結束語
本文針對皮帶給料式定量包裝秤存在的不足,設計了定量包裝秤模糊控製器和模糊自適應PID速度調節器,並且搭建了定量包裝秤模糊矢量控製係統仿真模型。通過仿真實驗,得出如下結論:(1)采用多級給料有效地減小了因衝擊力和空中落料量造成的稱重誤差;(2)針對不同的D和P,定量包裝秤模糊控製器相應地改變各級給料速度,增強了定量包裝秤對多種物料進行多種定量的適應性;(3)定量包裝秤模糊矢量控製係統,加快了響應速度,提高了動穩態性能和調節精度,且沒有超調量,增強了控製係統的魯棒性,更好地協調了計量速度和計量精度的矛盾。上述仿真結果驗證了該控製方法的合理性與有效性,為進行相關的硬件設計打下了基礎,具有一定的工程應用價值。
文章來源於網絡轉載,侵刪
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器