谘詢電話
ENGLISH0755-88840386糖果包裝機中三輪四杆機構改進設計
發布時間:2020-07-14 15:32:41 |來源:網絡轉載
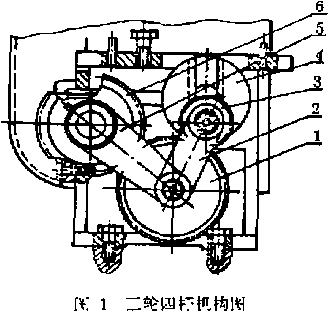
在輕工機械中,常可見三輪四杆機構用於實現短暫停歇":,它具有便於調節、結構緊湊, 製造方便,運轉平穩等許多優點。如上海益民食品一廠從德國引進的太妃糖包裝機中、驅動 糖條輸送部件就是用圖1所示的三輪四杆機構叫圖中,1為齒輪,2為連杆,3為主動齒輪,4 為盤形曲柄,5為揺杆,6為從動齒輪"
糖團被熱軋成條狀後,連續被送入包裝機進行切塊、包裝。在刀接觸糖條而進行切糖時, 希望糖條停止輸送;切糖完畢,刀離開糖條後,又希望糖條快速送進"以此來保證糖塊外形整 齊,並有較高生產率,該三輪四肝機構能滿足上述工藝要求.
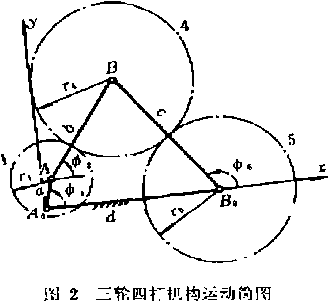
三輪四杆機構運動簡圖如圖2所示,山齒輪1、4利5與曲柄揺杆機構Ao ABBo組成.
 |
|||
 |
2 W與。的關係式
 |
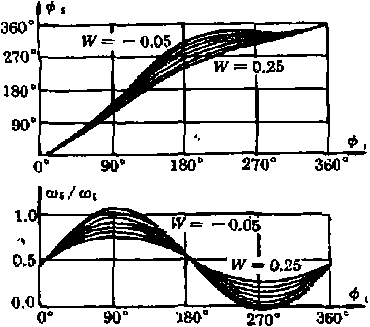
顯然,第二種運動規律是第一種運動規律和第三種 運動規律的臨界狀態,在理論上,第二種運動規律隻是出 現一次瞬時停歇,但在實際機構中,山於齒輪齧合存在齒 側問隙,轉動副中的冋隙和構件的彈性變形等影響,在通 常的製造偏差範圍內,從動齒輪5的停歇時間約等於齒 輪1轉過45°角,即相當於1/8周期嘰於是,第一種運動, 齒輪5的停歇時冋小於1/8周期,第三種運動齒輪5的 停歇時間大於1/8周期。
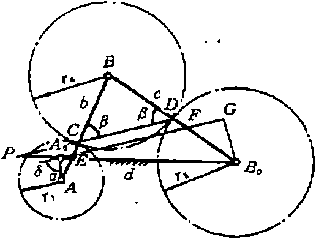
三輪四杆機構的刀的瞬時位置如圖4所示.齒輪5和齒輪1的相對速度瞬心p位於直 線AoBt和CD的交點上。於是可得關係式W~ [ cLts/ci) I Lin = Xmin/(xmi„ -F d).式中, 端m= PAo,貝 11 d/xmi„= (1— W}/W.
過點,作A『平行CD分別交A礦和BaB於E和F點,再過8。點,作B.G垂直
交於G點.在相似三角形PB.D和A0B0F中 B^F/FD = W)/ W
BaF + FD = —s 將式(16)和(17)聯立求解,得瓦戸=(1 一甲)%初=口一 W*.
又因EC=FD,故 AE=ri~ Wr5=
在直角三角形A.B.G中
小=(E 十薜十頁⑦2 +瓦匸
式中:
AaE — AEcosji — acos5 = (r, — Wr5)cos/i — acos<5 EF— 2(r< + FDcosfi— 2(r4 4- Wr5)cos^
FG = BtiFcosji = (1 一 W)rscos/S
BoG = 8oFsin步=(1 一 W)rssin#
在三角形A0AE中心sind =①一 Wrs)sin^r於是
ccostS = ^/(rc~ VK?'s)cos2/?-(ri - Wrs)z +a2 將式Q9)和式(20)代入式(18),得
d,= [ (6 + c) cos^—J 屍 eosj—屍+ a'] ’ + bs in 節 式中,B = □ + r<, C= r< +r 5,T= r, — Wr,. U= (1 — W)r^
16&c(&c-7U)rcos7-16&c(6c-T£7)(T2-a2)cos^-(& + c)!(^-a2)=0 (22) 解式(22)得
cos^=[(7B-aI)/2r]{l + C(64-c)2-r-[72V4y6c(bc-TL0 (23)
將式(23
 |
(24) 式(24)就是W和儉的關係式’
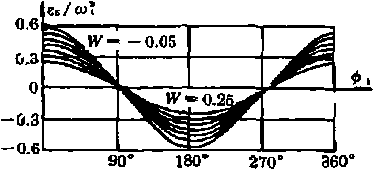
原包裝機的三輪四杆機構中,齒輪模數均為 m = 2mm,齒輪1的齒數= 25 ,其節圓半徑 rl = niZ1/2 = 25mm;齒輪4的齒數麽=55,其節圓 半徑七=50mm;齒輪5的齒數% = 2乙=50,其節 圓半徑r;= 2ri = 50mm;機架長度d= 115mm=取 1¥=0.25,0.20, -0.05,代人式(24)分別求出相 應的曲柄長度a.再按式(12), (14)和(15).可繪出如 圖5所示從動齒輪5的運動線圖。
 |
|
= arccosfX.b1+c2 ~ (d— ayj/2bc) 1
fi = arccos([(J2 + a2)—(62+cs)]/2&c)' 求y,和y2 ,可得最小傳動角編l Min加,呢}'虯 再以饑為變量,分別以[w/co^Tmax 和I £s/oj2|Tmax為目標函數用黃金分割法捜索
|
表1 |
||||
|
W |
a |
|
|
|e"礎 lw |
|
0>25 |
9,9S50 |
67.62 |
0.075476 |
0.26433 |
|
0.20 |
12.01013 |
66.06 |
0.80690 |
0.32160 |
|
CL15 |
14.04612 |
64.50 |
0.85^15 |
0.33074 |
|
0J0 |
16.09368 |
62.94 |
0091243 |
0.441% |
|
0,05 |
18.15357 |
61,39 |
0,96585 |
D.50549 |
|
0.00 |
20.22662 |
59.B3 |
1.01973 |
0.57157 |
|
-0.05 |
22.31368 |
58.27 |
1.07408 |
0.6d048 |
|
可得原機構的和丨C5/(yi|->max列於表L |
由表1可見,曲柄長度a調節得愈短,相應的愈大,[伽和丨鴕/岡皿愈小, 即運動愈平穩.但a愈短則W愈大,即淳歇時間愈短.因此,隻要停歇時冋能滿足工藝要求, 盡可能取IV大些,國外引進的先進機器中,往往取陟等於平均傳動比之半E%由式(11)可 知,原機構的平均傳動比為0.5,故秘可取到0.25.
3改進設計保持原機構的機架長度4、齒輪1和5不變,取W=0.25,Z, = 55,54, •、••、- ,40,可由 式(24)求得a,由式(25)求得加”,列於表2o
從表 2 可見.當 Z」= 43.即 r〈 = 43mm 時,a = 8.96713mm, 6 = 68mm,c= 93mm,其最小 傳動角 7ml„=80.47° 較大.逬一步保持 d= 115mm不變,取 0.25, Z, = 25,24r - 17, Z5 = 2Zi,Z4 = 55,54, - ,40,由式(24)和(25)可求得a和y„in.比較後可得:當 務= 18,麽=54肘.有最大的?亦=83.38°.如表3所示.
|
表2 |
表3 |
||||||||
|
& |
a |
b |
c |
,皿貝 |
|
a |
b |
C |
:,nir> |
|
55 |
9.98500 |
80 |
105 |
67.62 |
55 |
6.19578 |
73 |
91 |
82.05 |
|
54 |
9.91947 |
79 |
104 |
68.53 |
54 |
6 J1874 |
72 |
90 |
83.38 |
|
53 |
9,85116 |
78 |
103 |
69,46 |
53 |
6.33767 |
71 |
89 |
81.99 |
|
52 |
9.77988 |
77 |
102 |
70.43 |
52 |
6,225225 |
70 |
S8 |
80.38 |
|
|
9.70545 |
76 |
101 |
7偵3 |
51 |
6.16212 |
69 |
87 |
78.71 |
|
6C |
9.62766 |
75 |
100 |
72,46 |
50 |
6.0668€ |
68 |
86 |
76.97 |
|
49 |
9.54628 |
74 |
&9 |
73.52 |
卻 |
5.96601 |
67 |
85 |
75.15 |
|
48 |
9,46107 |
73 |
98 |
74.62 |
48 |
5.85906 |
66 |
8-1 |
75.25 |
|
47 |
9,37177 |
72 |
97 |
76.76 |
47 |
6.71539 |
65 |
83 |
71.27 |
|
J6 |
9.27806 |
71 |
96 |
76.94 |
46 |
5.62433 |
64 |
32 |
69.18 |
|
45 |
9.17964 |
70 |
95 |
78.17 |
45 |
5.49506 |
63 |
81 |
66用9 |
|
44 |
9,07613 |
69 |
94 |
79.44 |
44 |
5.3^665 |
62 |
B0 |
64.69 |
|
43 |
3.96713 |
68 |
93 |
80.47 |
43 |
5.207^9 |
61 |
79 |
62.25 |
|
42 |
8.85220 |
67 |
92 |
78.84 |
42 |
5.04775 |
60 |
78 |
59-66 |
|
41 |
8.730S3 |
66 |
91 |
77.16 |
41 |
4.S7430 |
59 |
77 |
56,92 |
|
•40 |
8.G0247 |
65 |
90 |
75.38 |
40 |
4,68565 |
58 |
76 |
53.98 |
圖6所示為改進後三輪四杆機構的運動線圈.在該機構中,機架長度rf-115mm保持不 變.齒輪1的齒數務=18,其節圓半徑□ = 18mm;齒輪4的齒數務= 54,其節圓半徑r,— 54mm;齒輪5的齒數爲=2務=36,其節圓 半徑s = 36mm。連杆長度 6=rL + n —72mm,搖杆長度 C=n + rs=9D mm.仍取 W7=0.25.0.20,…,一0.05,可計 算出 a,y„in, Ecos/coilma.和 I £s/
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:卷煙包裝機的分析研究
- 下一篇:氯化銨包裝機的研製、開發
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器