谘詢電話
ENGLISH0755-88840386超細粉末自動包裝機 PLC控製係統的設計
發布時間:2020-05-11 15:30:05 |來源:網絡轉載
- 係統簡介及設計思想
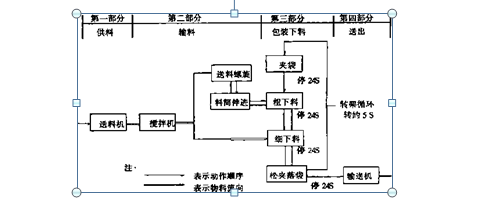
粉末包裝有特殊的要求, 通過伸進式的封閉下料, 設備的幹涉多, 係統監控要求複雜。 下麵介紹包裝係統方案 , 並對其主要部分的設計要素進行介紹:
式選擇上, 采用旋轉裝夾的方式, 共包括四個工位:
夾袋工位、 粗下料工位、 細下料工位和落袋工位。其間的控製信號通過轉架轉軸實現規定工位的信號隔 離輸送。
係統主要由以下幾個部件構成:
① 送料機構;
② 總貯料倉 (含攪拌機構) ;
③ 送料螺旋 1 (負責將料橫向引出);
④ 送料螺旋 2 (將料縱向送給粗下料機構);
⑤ 粗下料機構 (包括料筒伸進機構, 帶攪拌粗下料螺旋, 小貯料倉);
⑥ 細下料機構;
⑦ 轉架機構;
⑧ 夾袋機構;
⑨ 稱量係統;
10 輸送機構;
在設計方案中,由於材料細小且具有不均勻性,
故采用螺旋輸送方式下料。粗下料由三個螺旋機構 傳輸, 先由橫向螺旋機 1將粉末從料倉中引出, 由螺旋機 2導入粗下料儲備倉, 最後由粗下料螺旋機伸進下料; 細下料由細下料螺旋機直接從料倉中取料、 下料, 而不設中間送料機構。 在粗料倉中可以儲備螺旋機 1. 2運轉 30s的輸送量, 而相當於粗下料螺旋機在 15s內的輸送量。 在下料機構的下料方
傳輸, 先由橫向螺旋機 1將粉末從料倉中引出, 由螺旋機 2導入粗下料儲備倉, 最後由粗下料螺旋機伸進下料; 細下料由細下料螺旋機直接從料倉中取料、 下料, 而不設中間送料機構。 在粗料倉中可以儲備螺旋機 1. 2運轉 30s的輸送量, 而相當於粗下料螺旋機在 15s內的輸送量。 在下料機構的下料方
包裝線控製係統包括:
- 采用 OM RON的 SYSM AC係列超小型的C PM IA- 40CDR- AC可編程控製器;
- 功率執行設備, 現場端子箱,現場操作箱等;
- 操作台及控製電源係統;
- 被控對象及傳感檢測係統。硬件設計如圖 2。
- 係統軟件的設計及係統控製信號和動作要求
2. 1 設計方法
傳統的設計方法是順序流程, 因控製對象動作 處於轉架之上, 容易形成信號重疊, 一般使用各工位獨立控製的方法, 采用每個工位由一個小的 PLC 單獨控製, 因而其實現的功能有限, 難以與外設通訊。現采用一隻 PLC實現控製的新方案, 就大大節約了成本, 而且, 因其設在轉架外部, 信號易於實現被上位機監控, 易於與各種外設通訊, 使其控製更具靈活性, 從而具有較大的擴展能力, 用傳統的PLC流程圖分析, 這是難以達到的, 因各工位是並行工作關係, 要使用順序控製的 PLC來實現, 必需改變思路; 本程序中, 采用在到位的一個非常短脈衝周期時間內, 讓係統瞬時接受信號, 並完成處理, 回複到待命狀態, 這樣, 以迅速反應的觸發電路來避開信號衝突的時間, 再通過延時處理來達到有序執行, 實現控製。
2. 2 本設計的構思及采用方法
( 1) 信號傳輸設計: 四工位如圖 3; 信號傳輸部件的設計是一個比較關鍵的環節, 必須使四個工位信號的生命周期處於適當的時段, 這樣才能有效地控製各工位的動作正常進.
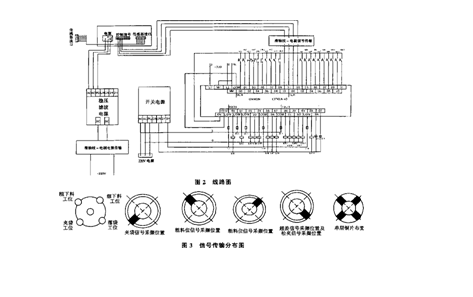
現設計成隻在相應工位上取出或輸入相關信號。 外圈上安裝有電刷, 轉動到位時處在相應工位上的固定電刷隻能取出正在轉至該工位的表位的信
號, 所需設計盤片有: 夾袋信號盤片 (輸入、 輸出各一片)、 粗料位信號盤片、 細料位信號盤片、 超差信號盤片、 鬆夾信號盤片。 共需設計 6塊盤片, 排成 6層。 信號采擷的位置 (即安裝電刷的位置) 如圖 3, 除夾袋信號輸入盤片可設計為整片覆蓋銅片外, 其餘盤片銅片布置僅在對應位置上, 如圖 3單層銅片布置方式, 實現信號隔離。
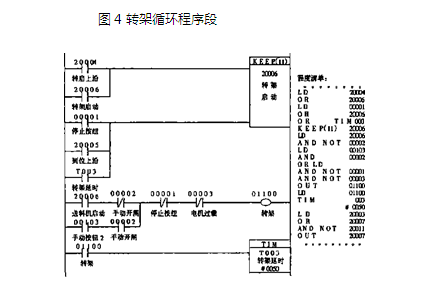
( 2) 轉架循環的實現。轉架啟動通過停止延時信號來實現, 規定停止的時間為 25s, 以到位信號的上沿為計時開始, 當延時到達時, 發出信號使轉架啟動, 轉架轉至下一個工位觸動到位開關, 到位上沿使轉架轉動停止, 並進入下一個到位延時, 實現到位延時控製。 在轉架循環中, 為了準確定位, 還要設一定位銷, 因此, 在停止時間裏將分出一點拔銷的時間, 待拔銷結束後再啟動, 這裏設為 1s。 另外, 為防止到位信號出現故障, 或是電機轉過位或不到位等等故障現象,須設置一個軟件監控延時,在 延時到達而還沒有停止轉架則該監視信號將停止轉架的運行。 此外, 還進行手動、 停止等控製。 手動控製和前麵的電機一樣, 須將手動開閘開關轉到手動功能一端, 然後, 才能通過手動控製按鈕來控製轉架的轉動。 料筒離開是轉架啟動的關鍵, 筒沒有離開, 則不進行拔銷轉動。
圖 4 轉架循環程序段
( 3) 筒進控製。通過虛設一個夾袋標誌, 將其保持到下一個到位稍晚一點時間,當到位上沿一來, 立即觸動筒進自鎖, 從而實現快速筒進, 當筒進延時到來時, 將停止筒進, 由行程開關帶動電磁閥換向, 將料筒緩慢退回, 並邊退邊下料。
( 4) 粗下料的動作控製。 粗下料螺旋的啟停,
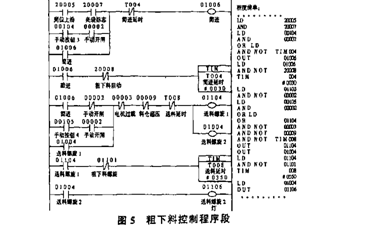
當筒進到位時 , 開始啟動下料, 到粗到信號到來時停止, 或者手動停止, 手動下料采用並聯方式控製,當延時到來而還沒有粗到信號來臨時, 停止下料。夾袋工位有裝夾時, 在粗下料工位須予以粗下
料, 粗下料的過程是送料機構先動作, 料筒向下伸進, 到位後由行程開關控製漸漸退回, 並進行粗下料, 這裏設料筒伸進時間為 3s, 伸進到位後, 才啟
動下料螺旋機。直到稱重表頭發出粗料位到的信號。這裏還設置軟件監控延時, 監控延時來臨, 粗下料也將終止。 判斷有裝夾的方法是將夾袋信號虛設一個內部保持標誌。 在下一次到位上沿來臨之時交由粗下料啟控製使用; 通過到位上沿來觸發粗下料,在這裏還須設一個到位信號的延遲信號, 否則無法將夾袋信息保持到被采用時間。 經過這樣的處理, 夾袋保持信號迅速被處理, 這時, 在夾袋工位就又可以進行夾袋操作了。 這樣, 既保持了單工位動作曆經循環的獨立性, 又實現了並行的重複工作, 也不存在信號衝突 , 從而達到控製要求。 其具體實現梯形圖如圖 5所示, 設粗下料監控時間為 15s。
 |
( 5) 細下料的動作控製。 細下料螺旋的啟停,當粗下料啟動時, 設一粗下料保持信號, 當保持到細下料工位時 , 觸發細下料自鎖啟動, 實現細下料。手動及停止也像粗下料一樣控製。 細下料的動作控製采用方法和粗下料的方法一致, 將粗啟信號延時保持, 在細下料工位時予以采用。 更周全的方法是將粗到信號予以保持。 把保持信號按是否采用進行取消而不是使用延時要受到時間的影響, 細下料的監控時間設為 15s, 在實驗中為 10s以示區別。為了實現精確稱量, 在避免因信號衝擊抖動而產生的誤動作, 細下料時可將非細到信號設在 K EEP ( 11) 指令的上方, 細到信號抖動則電動機跟著抖動, 若為誤指令, 則下料至細到穩定時才完全停止下料, 保證稱量的準確性。
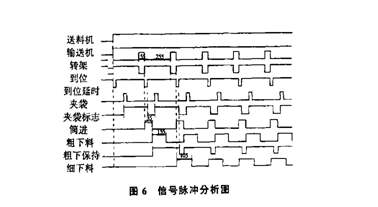
2. 3 程序控製的脈衝分析
如圖 6所示, 送料機及輸送機在啟動後檢測延時 10s完成即開始啟動並保持; 鬆夾及到位信號在啟動 10s後一般情況下處於高位的狀態, 即轉架在到位狀態下; 轉架的循環運轉在延時 10s後也進入運行狀態,開始時為停止延時 24s+ 拔銷 1s= 25s的時間, 25s後即進入轉動狀態, 反複循環; 當在到位狀態下, 有夾袋上沿脈衝信號產生時, 即產生一個夾袋保持標誌, 為了在下一個工位能夠取用該信號進行判斷是否有裝夾,還設置了一個到位延時信號, 該信號延時時間極短,這裏設為 5ms,當在下一到位時, 到位延時信號延時打開, 其上沿將取消夾袋保持信號, 使它此時進入該段停止時段的生命周期極短 (這裏是 5ms的時間) , 以夾袋保持信號為料筒伸進下料的條件 , 利用到位信號上沿觸發筒進信號產生並保持至其延時時間的到來 (就使它的生命周期為 3s) , 筒進信號的下沿將啟動粗下料進行粗下料, 這裏以其監控時間 15s作為其生命期, 通過粗下料信號的上沿製作一個粗下料保持信號, 與夾袋保持信號同樣的方法被取用為細下料動作的控製。
2. 4 本程序的功能
2. 4. 1 實時監控功能,對各執行部件的運行進行實
時監控。
2. 4. 2 動作判斷,能夠準確的判斷動作發生的前提條件是否存在。
2. 4. 3 實現邏輯聯鎖, 根據生產工藝要求, 按上述動作分析啟動 , 送料, 下料。
2. 4. 4 料筒退回檢測,料筒的伸入與轉架的轉動是兩個存在硬幹涉的動作, 如果料筒沒有退離, 轉架就開始啟動, 轉架與料筒的剛性交涉會使係統造成嚴重破壞, 因此, 料筒的退回, 必須是轉架轉動的
硬性條件之一。
2. 4. 5 轉架到位的檢測。必須隨時檢測轉架到位的情況, 轉架沒有到位, 料筒不能伸進, 否則, 料筒無法準確伸入裝夾位置, 而與轉架產生動作幹涉。
- 4. 6 故障信息的處理功能
- 電機故障,電機過載時, 係統將不予啟動,通過檢測即可知故障電機的位置, 如果在啟動的過程中產生過載現象, 電機即進入停止狀態等待檢修。
- 輸送設備憋堵故障。由於物料K8凯发登录入口過大或工藝設備不暢,有時造成送料設備中物料發生憋堵,現 場檢測憋堵的傳感器開關動作, 當憋堵故障被自動處理後, 重新啟動相關電機。
- 轉架位置的定位故障。通過定位銷將轉架準確定位, 定位銷的拔出是轉架的啟動條件之一。 如果銷未拔出, 使不能啟動後續以轉架到位上沿為條件的動作將處於等待狀態。
- 總儲料倉超重處理。料倉超重將停止送料機送料, 當料倉中的儲料被卸下, 超重信號解除時, 繼續將料送入料倉中, 起到自動處理的作用。
四個工位並行的稱量控製及裝夾信號處理, 使係統能完成既定功能, 這個部分控製的關聯性要求很強, 如果出現裝夾及稱量信號的故障, 可以自行判斷。
- 結語
此控製係統的設計已經在實驗中通過, 仿真調試成功, 經過多次反複驗證, 證明是切實可行的。在這樣的一些係統中不僅硬件設備簡單, 而且開發設計成本低, 實驗調試周期短, 投入少, 軟件的調試過程即為主要的設計要素, 其可以隨時進行多次或重複的調試過程而幾乎無任何損耗。 本係統以上優點, 可以適合動作存在避免幹涉要求、 連貫性強等等高要求場合。在粉末自動包裝機上采用 PLC控製技術, 實現並行的多工位控製以及滿足係統複雜的動作要求, 即使在係統硬性幹涉較多, 工藝要求較複雜的情況下, PLC也是能夠勝任這一工作的, 是PLC的應用在自動控製的領域裏又一用武之地。並 行控製提高了包裝的質量以及包裝的效率, 對於粉末包裝行業具有十分重要的意義。
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:電子定量包裝秤的特點和檢修
- 下一篇:電子配料秤在大型料場PLC係統中的應用
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器