谘詢電話
ENGLISH0755-88840386基於PLC的全自動糧食包裝機
發布時間:2021-08-05 15:57:06 |來源:網絡轉載
0引言
國內糧食包裝企業大多采用人工加簡易包裝機進行粗放式半自動閥口包裝,包裝時灰塵飛揚、汙染較嚴重,且用工較多、勞動強度較大。因此,全自動糧食包裝設備不僅可以減少糧食包裝環節對環境的汙染,防止工人塵肺病的發生,有效替代人工在惡劣環境下的工作,減少用工量,降低勞動強度,還能夠帶動傳統包裝機行業產業升級,提高糧食包裝廠家的生產效率。為此,以PLC為主控製器,設計了一套全自動糧食精密包裝機電氣控製係統,能夠保證係統的穩定性及有效減少糧食的包裝誤差。
1精密包裝機的工作原理
1.1包裝計量設備的選擇
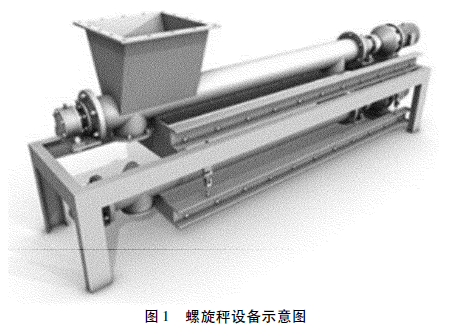
目前,市場上常用的包裝計量設備有定量給料機、轉子秤和螺旋秤3種。其中,螺旋秤是指稱重給料機對粉狀、散粒狀進行連續輸送、動態計量及控製給料的生產計量設備。螺旋秤設備如圖1所示。螺旋秤工作原理為:通過對絞刀轉動速度和圈數的控製,確定排出的物料體積,同時稱重傳感器對已包裝入袋的物料質量進行實時檢測;然後,將質量信號和和絞刀速度數據一起送入PLC控製器;最後,控製係統將實際K8凯发登录入口信號和預設值進行對比,並通過PID控製器驅動變頻器,動態調節喂料絞刀的速度,從而實現定量給料。根據全自動糧食精密包裝機生產線配重係統的要求,本文選用螺旋秤作為係統送料計量設備。
1.2包裝計量裝置的整體結構
包裝計量裝置主要包括原料倉、伺服電機、螺旋送料機、秤台和PLC控製係統等部件,如圖2所示。
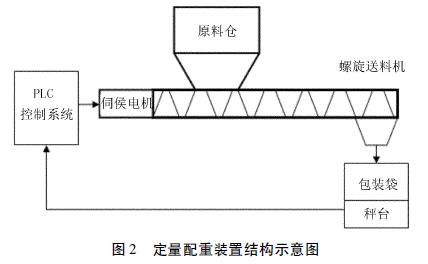
定量配重裝置各零部件的功能描述如下:
1)原料倉:待包裝糧食進入口;
2)伺服電機:驅動螺旋送料機正常運轉;
3)螺旋送料機:將糧食從原料倉輸送到包裝袋;
4)秤台:將包裝袋裏麵的糧食質量實時發送給嵌入式控製係統;
5)PLC控製係統:根據秤台實時發送回來的糧食質量信號,給伺服電機發送電機轉速信號,從而實現螺旋送料機加料量的智能控製。
1.3包裝計量裝置的工作原理
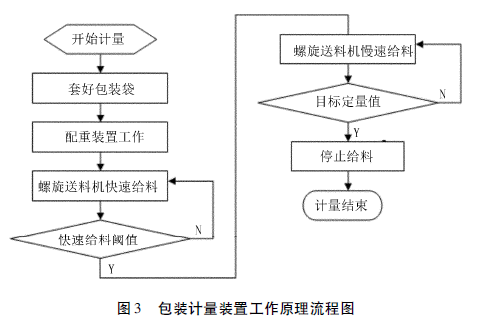
包裝計量裝置的整個工程流程由PLC控製器控製,自動完成糧食的計量和包裝。整個工作流程為:係統開始正常工作後,由上級供料係統向原料倉供料;PLC控製器根據預先設計的包裝袋質量、目標定量值和快慢給料閾值信息,驅動伺服電機控製螺旋送料機開始進行快速給料操作;秤台獲取包裝袋已裝物料的模擬質量信息,經過濾波、放大、A/D轉換等操作,發送至PLC控製器,由其判斷是否已經達到預先設定的快速給料閾值;若達到快速給料閾值,則螺旋送料機開始進行慢速給料操作,當達到預先設定的目標定量值後,停止給料;該包裝過程結束,開啟下一包裝過程。包裝計量裝置的工作流程如圖3所示。
1.4包裝計量裝置機械部分的設計
包裝計量裝置機械結構是整個係統的核心部分,該部分設計的合理性和效率對整個係統的成本、可行性和精確度具有重要的影響。
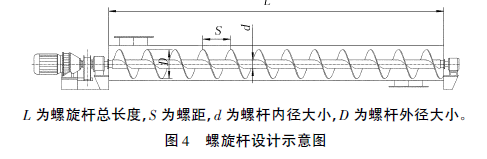
包裝計量裝置機械部分包括送料機、計量設備及嵌入式控製器等。其中,計量設備是定量配重裝置機械部分最重要的部件,而螺旋杆是計量設備的核心。螺旋秤在糧食包裝計量的實際應用中,最重要的零件是螺杆。螺旋秤中的螺杆,應該使設備符合大部分糧食的精密包裝,因此在對螺杆的設計中不僅要滿足設備對產量和要求,還要符合設備關於精度的要求。螺旋杆設計示意如圖4所示。
螺杆外徑參數設定越大,每次帶出的糧食質量越大,計量誤差也越大;參數設定越小,因增加電機轉動的次數,包裝效率就越低。為了防止電機的抖動導致糧食的溢出,引起計量誤差,設計中將螺杆和伺服電機同軸轉動。
為了方便螺杆參數的設計計算,采用矩形截麵螺紋的計算方法。其中,伺服電機帶動螺杆旋轉1次,帶出的糧食體積V為
V=F·L=t(S-b)·π·d/cosα(cm3) (1)
螺杆每次帶出的糧食質量M為
M=V·γ·n(kg) (2)其中,F為矩形螺紋截麵積;L為螺旋杆總長度;t為螺旋槽深度;S為螺距;b為螺旋葉片厚度;d為螺杆內徑大小;α為螺旋升角;γ為糧食單位容積質量值;n為螺杆的轉速。
螺杆參數的設計取決於待包裝糧食對象,式(1)和式(2)決定了螺杆參數的計算,這些參數的設定直接關係到整個係統的計量精度。
在計算過程中,假定螺旋填充率為1,根據以往經驗和試驗比較,設S=D=25cm,d=4cm。該參數屬於標準螺旋,對大部分糧食具有廣泛的適應性,能夠滿足設計要求,符合計量精度標準。
2全自動糧食精密包裝機伺服係統的建模
2.1伺服係統機械傳動的數學模型
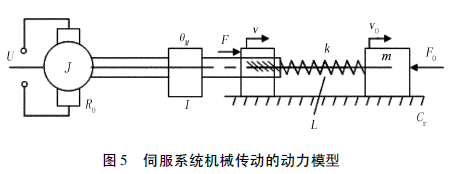
伺服係統機械傳動結構主要包括電機、聯軸器、螺旋和定位螺旋絲杆等幾個部分。伺服電機的角位移量是傳動結構的輸入值,記為θM(t);伺服電機帶出的糧食體積是傳動結構的輸出值,記為v0(t)。經過研究分析後,將伺服係統機械傳動轉化為如圖5所示的模型。
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:粉狀物料包裝機及其上料倉設計
- 下一篇:JY500B21失重秤控製儀表
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器