谘詢電話
ENGLISH0755-88840386基於ARM的多功能新型智能稱重儀
發布時間:2021-06-25 16:39:16 |來源:網絡轉載
0引言
智能稱重係統在工業生產和日常生活中應用廣泛,市場上的這些台稱與平台稱等小型稱重計量儀表,主要是對靜止的東西(如貨物)稱重,而對動態稱重(如動物,家禽)存在功能單一或者沒有相應的功能的問題[1]。在稱重技術中,應用最普遍的是由應變片和彈性體組成的測力傳感器。將重物放於稱重係統的托架上,待穩定後,就可以準確地讀出重量值,但當需要進行快速稱重時,這種傳感器就暴露出缺陷。由於其彈性體的阻尼比過小,傳感器到達穩態的時間較長,不能滿足快速測量的要求[2]。稱重信號中包含低頻隨機幹擾,且采樣得到的信號太短,對動態稱重信號作簡單的數字濾波,係統的精度難以得到很大的提高。依據衡器國家行業標準,基於嵌入式計算機研製了新型的多功能智能稱重儀,稱重儀既具有基本稱重功能包括按鍵皮重功能、皮重內鎖功能、自動去皮功能、自動零跟蹤功能、動態檢測功能、手動和自動累計功能,又有動物稱重、計數、峰值保持和累加等特殊稱重功能。
1嵌入式稱重儀硬件構成
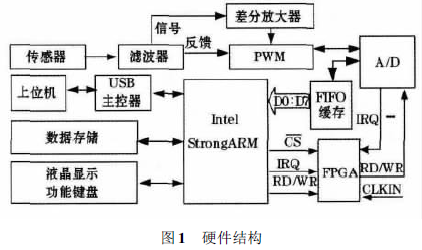
係統由嵌入式計算機、數據采集與存儲、信號處理、PWM脈寬調製、人機接口和USB接口通信等電路部分組成,如圖1所示。硬件電路由ARM作為係統的控製中心,完成多路信息的實時采集,對實時采集的數據進行數字濾波校正、分時存儲,完成對數字信號運算、顯示、傳輸等功能,可以通過對擴展電路的控製,對鍵盤進行掃描,而後通過鍵盤散轉程序,對整個係統進行控製。信號采集部分利用稱重傳感器檢測壓力信號,得到微弱的電壓信號,而後經處理電路(濾波、差動放大)以及PWM脈寬調製處理後,送A/D轉換器轉化為數字量輸出。通過USB接口與上位機通訊,可根據主機PC發送的控製參數,對被測對象的壓力參數進行控製調節,進一步完成人機交互界麵的管理、圖形功能、參數設定及自診斷。
嵌入式硬件是嵌入式32位處理器StrongARM*SA-1110,軟件平台采用WindowsCE。PlatformBuilder是為嵌入係統設備開發和定製基於WindowsCE的操作係統的工具。在創建基本平台的過程中主要包括配置平台、創建操作係統映像、傳輸映像到目標設備和調試係統,而在定製平台的過程中主要有開發用戶自己的OAL(OEMAdoptionLayer)、設備驅動程序、引導裝載程序、組件、本地化等[3]。
2主要電路設計
2.1數據采集電路
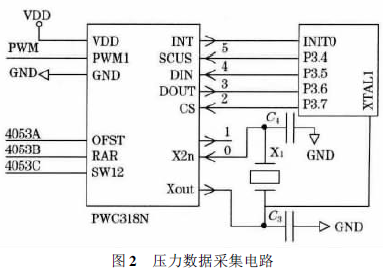
采用高精度A/D轉換器PWC318N,用模擬開關、積分器、比較器等構成Σ-Δ型調製器,轉換速率可達200次/s,與控製器結合PWC318實現對調製器脈衝信號進行數字抽取濾波,非常適用於高精度電子天平和電子秤等場合。通過連接外部晶體振蕩器,PWC318的內部時鍾發生器產生時鍾頻率信號TCLK,脈寬控製器接受比較器的輸出Σ-Δ碼,同步到PWC318的內部時鍾信號,產生脈寬輸出信號。脈寬輸出信號控製模擬開關,當為“0”時,接通-VREF,當為“1”時,接通+VREF。PWC318通過內部16位計數器來計數脈寬輸出信號為高電平時的脈衝數,將結果進行迭加後,通過向控製器發中斷請求,控製器讀計數值,實現對2N個采樣值迭加後取平均值的數字濾波,數據采集電路如圖2所示。
2.2人機接口電路
稱重儀需要實現輸出各種結果顯示,采用AG320240大屏點陣圖形液晶顯示模塊。控製器中使用了512K字節的存儲器,存儲了係統需要的16×16點陣漢字字庫、界麵顯示背景圖等。由於液晶顯示器內置了SED1335控製器,對液晶顯示器的控製變為對SED1335控製器進行接口通信,簡化了對液晶顯示的控製。稱重係統中設有多個功能鍵,鍵盤采用矩陣形式排列,按鍵設置在行列式交點上,通過鍵盤向裝置係統輸入相關參數和控製命令。
2.3信號處理與PWM電路
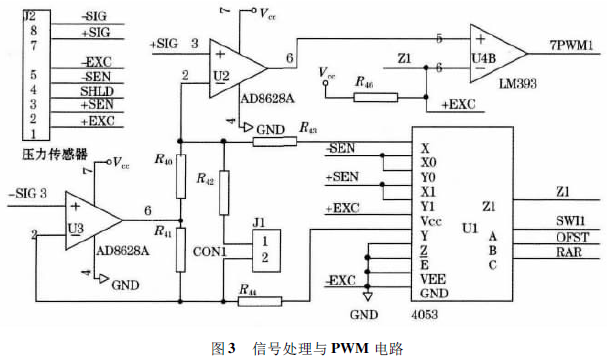
傳感器是稱重係統中實際承壓值測量的關鍵元件,稱重傳感器采用了應變片壓力傳感器,輸出的信號通過濾波電路後送給差動放大器。采用PWM脈寬調製電路,實現對小信號的自動控製補償,提高了電路的線性和穩定性。信號處理與PWM電路如圖3所示。
3稱重儀的動態補償
荷重係統經過簡化可以看成單自由度二階係統,測重環節中的應變式測重傳感器加秤體構成測重部分,可以等效為由彈簧、阻尼器組成[4],係統等效模型如圖4所示。
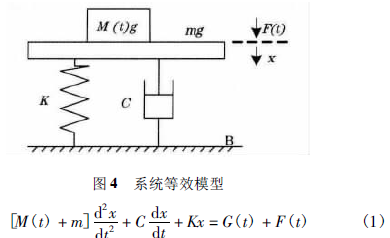
式中:m為秤體質量,由傳感器本身的等效質量和托盤質量組成;M(t)為被測質量;C為阻尼比例係數;K為剛度係數;x為在垂直方向偏離平衡點的位移;F(t)為垂直方向作用力。
采用分段線性化法將模型近似為線性時不變係統,建立係統的數學模型。因為應變與應力呈正比,而電橋輸出電壓U與應變呈正比關係。設在一個時間段[t0,t0+Δt]內,式(1)可以簡化為一個線性時不變係統,把F看作是Mg的一部分,即G=Mg+F。設各種初始條件為零,K0為靈敏係數,對式(1)做拉普拉斯變換得:
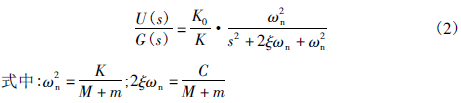
當秤體空載時,敲擊秤台產生衝擊激勵信號,獲得係統的衝擊響應,從而得到係統模型[4],其階躍響應如文獻[5]。荷重係統的動態響應品質較差,由於阻尼非常小,振蕩嚴重,采集的信號不能反映真實的測量值,同時阻尼過小,動態響應過程到達穩態的調節時間長,測重係統的快速性得不到保證。采用動態數字補償處理改變係統阻尼係數,在係統中增加串聯補償環節必須盡可能提高係統輸出動態品質,即盡可能增加ωn,ξ達到最佳值0.707左右。係統輸出由X(s)轉化為Y(s),即Y(s)=X(s)H(s),且使Y(s)的ξ達到0.707,ωn不變。設數字補償環節H(s)的零點為X(s)的極點,數字補償環節H(s)的極點為Y(s)的極點,並將s域變換到z域,作雙線性變換有[6]:

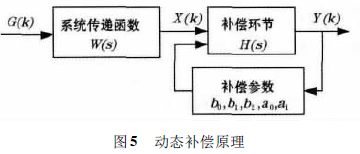
假設係統傳遞函數W(s),係統的模型隨質量M(t)改變而不斷改變它的極點,補償環節H(s)要保證係統始終是最佳二階係統,也應跟隨係統動態模型不斷調整自己的零點,與係統的極點相抵消,達到動態補償的目的,H(s)的係數隨質量M(t)是不斷變化的,補償原理如圖5所示。
敲擊實驗獲得實驗過渡過程曲線,由文獻[2]中的公式計算ξ,ωn值,其階躍響應如圖6(a)所示,傳感器在最終輸出穩定值之前,穩定輸出需要0.55s.
對自適應補償進行仿真驗證,考慮模型存在誤差情況下的自適應補償效果。因此,將係統的固有頻率ωn減小,此時,自適應補償環節的零點與模型極點不能完全抵消。得到自適應補償前後的係統階躍響應特性,如圖6(b)所示。係統的動態響應特性得到顯著改善,係統階躍響應達到97%穩態輸出的穩定時間為0.6s,小於沒有補償0.55s,在存在係統誤差的情況下,能很好地提高動態測重的速度。

4試驗與分析
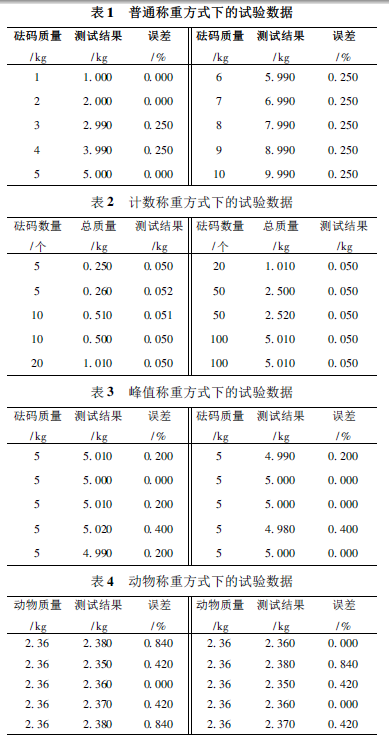
針對稱重儀進行了普通稱重方式、計數稱重方式、峰值稱重方式和動物稱重方式的試驗。普通稱重方式、計數稱重方式、峰值稱重方式用砝碼作為稱重對象,每種方式下測試10次,經傳感器校準,數字濾波和非線性補償後,每隔10min讀一次稱重顯示,普通稱重測量誤差小於0.25%,峰值稱重和計數稱重測量誤差都小於0.4%,動物稱重誤差小於0.84%,稱重精度達到設計的要求,穩定可靠,測試結果如表1、表2、表3和表4所示。
5結束語
基於嵌入式計算機,並用USB接口,根據需求搭建了硬件平台,對傳感器進行補償,使得傳感器的振蕩得以有效抑製,提高了係統響應的快速性,經過數字濾波等軟件處理,實現普通稱重方式和特殊稱重方式。多功能便攜式智能稱重係統具有良好的可靠性、準確性和抗幹擾能力,處理速度和測量精度提高,滿足了稱重的實時性要求,取得了良好的效果。
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:二檔標準稱重儀的調試與檢測方法
- 下一篇:基於HX711數顯稱重儀的設計
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器