谘詢電話
ENGLISH0755-88840386基於PLC的包裝袋機械手控製係統設計
發布時間:2021-04-06 15:48:21 |來源:網絡轉載
包裝是產品進入流通領域的必要條件⑴,而實現包裝的主要手段是使用包裝機械⑵。隨著技術的進步、時代的發展,包裝機械在包裝領域中正起著越來越大的作用。包裝機械有多種分類方法:按功能可分為單功能包裝機和多功能包裝機⑶;按包裝品種可分為專用包裝機和通用包裝機;按使用目的可分為內包裝機和外包裝機;按自動化水平分為半自動機和全自動機等。包裝袋的折邊折角作業是包裝過程中的一個很重要的工序,然而現有的包裝袋折邊折角大量采用人工操作,尚未完全實現自動化,工人的工作環境差,工作枯燥,生產積極性不高。基於此,本文對包裝袋折邊折角作業機械手控製係統進行設計。該機械手采用氣動方式提供動力,通過PLC對機械手ET。]進行控製,能夠同時實現包裝袋折邊和折角2道工序,並可以和自動流水生產線配合使用,顯著提高了生產效率。
1生產線流程改造方法
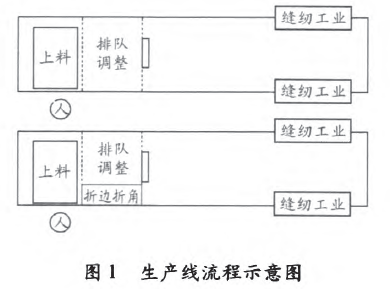
包裝袋進行縫紉前需要進行折邊和折角作業,其生產線流程示意圖如圖1所示。折邊折角作業機械手安放在排對調整位置,工人在上料工位把包裝袋放置在上料處,經自動流水傳送帶傳輸到排隊調整位置,折邊折角完成後自動運送到縫紉工位。
2包裝袋折邊折角作業機械手的結構和工作過程
2.1折邊折角作業機械手結構
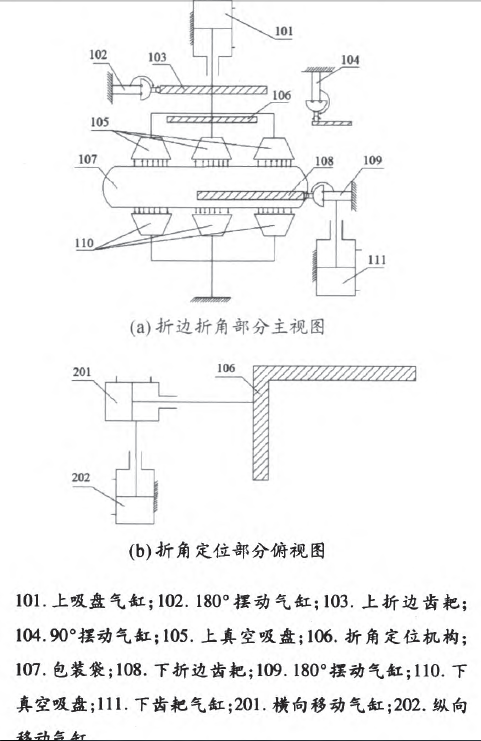
包裝袋折邊折角作業機械手結構包括:折邊折角部分圖2(a)和折角定位部分圖2(b)兩大部分,其中折邊折角部分主要由上吸盤氣缸、2個180。擺動氣缸、上折邊齒耙、下折邊齒耙、90。擺動氣缸、上真空吸盤、下真空吸盤、包裝袋、下齒耙氣缸組成。折邊折角部分主要完成真空吸盤打開包裝袋、包裝袋折邊、包裝袋折角的功能。其中上折邊齒耙和下折邊齒耙各連接一個180。擺動氣缸,實現包裝袋上下兩邊的折邊工序,90。擺動氣缸實現包裝袋的折角工序。
折角定位部分主要由橫向移動氣缸、縱向移動氣缸和折角定位機構組成。在橫向移動氣缸和縱向移動氣缸的雙重推動下,折角定位機構實現橫向和縱向移動。折角定位部分的功能:為折角工序提供準確的定位,保證折角動作的順利完成。圖2為包裝袋折邊折角作業機械手結構示意圖。
2.2包裝袋折邊折角作業機械手工作過程
1)將包裝袋放置在上料處,經自動流水生產線運送到折邊折角位置停止。
2)袋子下麵的真空吸盤保持不動,包裝袋上麵的真空吸盤利用上吸盤氣缸吸引至折邊位置處,從而完成包裝袋打開動作。
3)利用2個180。擺動氣缸分別旋轉上下2個折邊齒耙,當2個齒耙都旋轉180。時完成折邊工序。
4)利用橫向移動氣缸和縱向移動氣缸推動折角定位機構在導軌上麵實現橫向和縱向運動,當折角定位機構到達所需的定位位置處停止。
5)90。擺動氣缸轉出,計時1s後轉回,完成折角工序。
6)將折角定位機構按照原路返回,從而實現折角定位機構退出包裝袋。
7)2個180。擺動氣缸帶動上折邊齒耙和下折邊齒耙同時轉回。
8)吸盤下壓,完成折邊折角流程。
9)下折邊齒耙利用氣缸提供動力下移,流水線運走包裝袋至縫紉工位後上移至原位置複位,與此同時機構開始下一次循環。
3包裝袋折邊折角作業機械手氣動控製係統設計
3.1氣缸的選擇
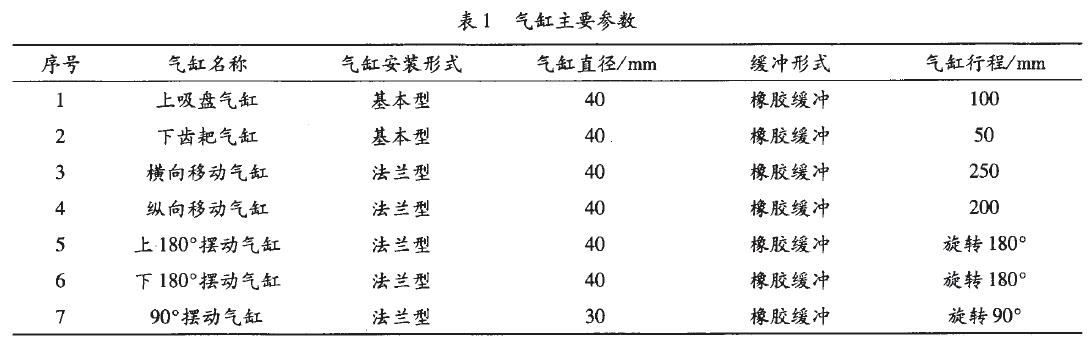
氣缸的選型包括以下步驟:選定氣缸的缸徑,選定氣缸的行程,選定氣缸的品種,選定氣紅的安裝形式,選定氣缸的緩衝形式,選定磁性開關。經過計算,包裝袋的折邊折角作業機械手所用的氣缸主要參數如表1所示。
3.2氣動控製原理圖的設計
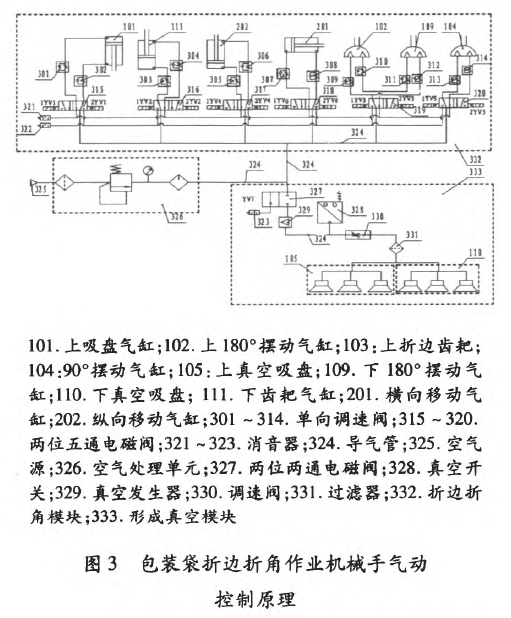
通過對包裝袋折邊折角作業機械手結構設計和工作原理的分析,設計了氣動控製係統。該機械手氣動控製原理如圖3所示。氣動控製係統由空氣源、空氣處理單元、折邊折角模塊、形成真空模塊4部分組成,其中:空氣處理單元對空氣源進行處理,使處理後的空氣能夠被該氣動控製係統使用。折邊折角模塊共包括4個伸縮氣缸和3個擺動氣缸,其中上吸盤氣缸(101)和下齒耙氣缸(111)實現上、下伸縮運動;縱向移動氣缸(202)實現縱向方向的伸縮運動;橫向移動氣缸(201)實現橫向的伸縮運動;2個180。擺動氣缸(102和109)通過同一個電磁閥進行180。同步旋轉運動,用來實現包裝袋的上、下2個折邊動作同步進行,從而實現折邊工序;90。擺動氣缸(104)進行90。旋轉運動,實現包裝袋的折角工序。這些氣缸的換向通過兩位五通電磁閥來實現。為了保證氣缸運動的平穩性,每個氣缸回路均連接了單向調速閥。為了降低氣動控製係統的噪音,6個兩位五通電磁閥連接了消音器,並通過一個電磁閥集裝板安裝。形成真空模塊主要利用真空發生器能夠形成真空的原理設計,通過該模塊,能夠使上真空吸盤(105)和下真空吸盤(110)產生真空負壓,進而吸引包裝袋並打開包裝袋。
4PLC控製係統設計
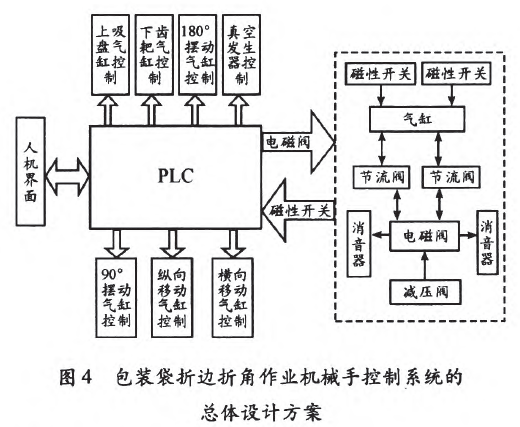
4.1控製係統的總體設計方案
圖4為包裝袋折邊折角作業機械手控製係統J"的總體設計方案。係統采用PLC進行控製,需要同時進行上吸盤氣缸控製、下齒耙氣缸控製、2個180。擺動氣缸控製、真空發生器控製、90。擺動氣缸控製、縱向移動氣缸控製以及橫向移動氣缸的控製。為了保證包裝袋上折邊和下折邊同時進行,即上折邊齒耙和下折邊齒耙能夠同步旋轉,2個180。擺動氣缸通過同一個兩位五通電磁閥進行控製。同時,為了方便操作人員對設備運行進行實時監控和操作,采用人機界麵觸摸屏控製,使人機交互更加簡單、直觀。
包裝袋折邊折角作業機械手控製係統的工作分為全自動模式和單周期模式。在全自動模式下,機械手的每個動作執行完後,下一個動作自動執行,通過與自動化流水生產線的配合,不停地進行一個又一個的包裝袋折邊折角動作。在單周期模式下,當一個包裝袋折邊折角完成後,機械手自動停止。在這種模式下,如果需要進行下一個包裝袋的折邊折角,需要重新按下啟動按鈕。此外,設備設置了回原點複位按鈕,當有特殊情況發生導致係統出錯時,可以通過回原點複位按鈕將係統還原到初始狀態。
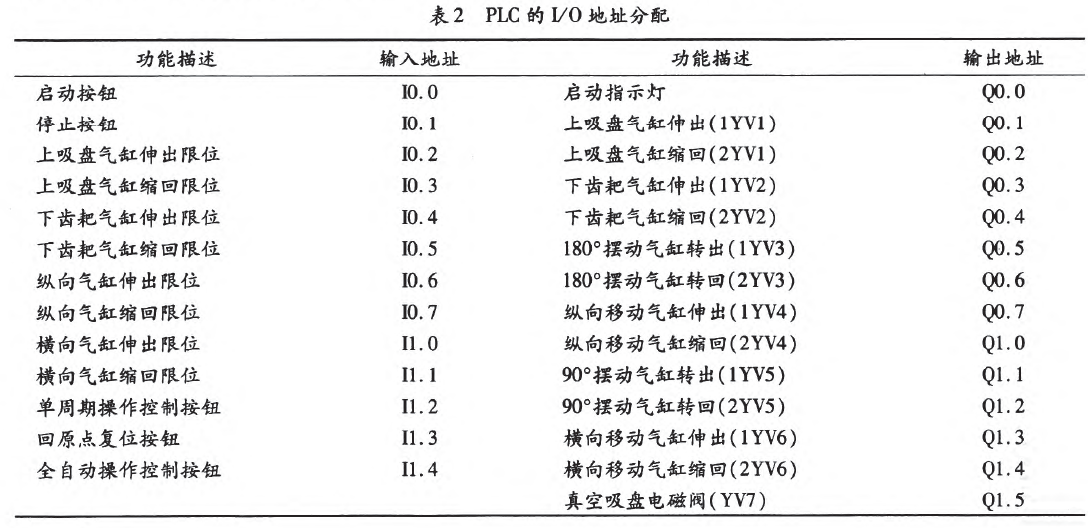
4.2機械手PLC的I/O地址分配表
本文采用西門子S7-200係列微型PLC、CPU226、DC/DC/DC晶體管輸出型PLC。晶體管輸出型PLC有24輸入、16輸出,能夠滿足包裝袋折邊折角作業機械手控製係統的控製要求。
根據機械手所需的輸入/輸出點數,同時為了方便PLC的外部接線及程序設計,將PLC的I/O地址分配如表2所示。
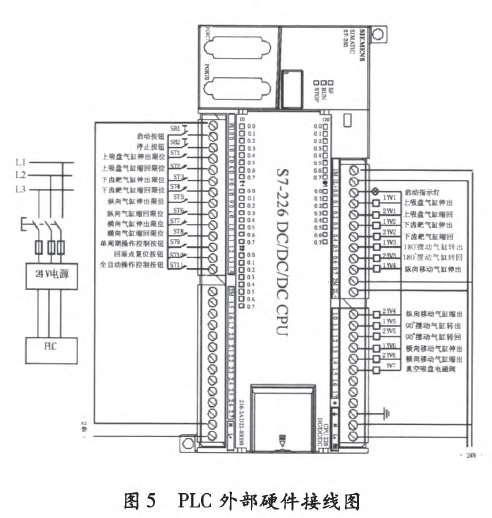
4.3硬件電路設計
根據PLC的I/O地址分配表,設計如圖5所示的PLC外部硬件接線圖。
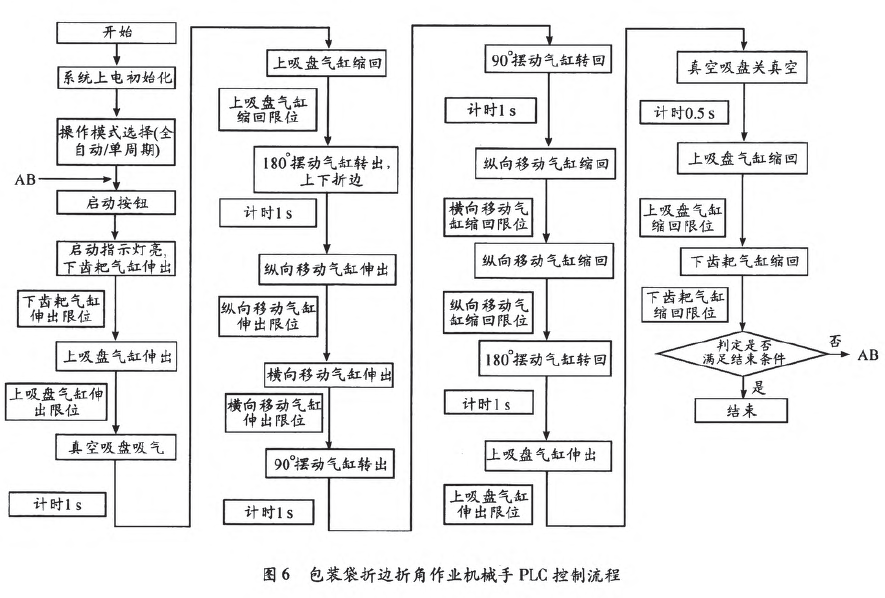
4.4PLC控製流程
包裝袋折邊折角作業機械手的控製主要包括以下幾個工作過程:下齒耙氣缸的控製、氣缸打開包裝袋的控製、包裝袋折邊氣缸的控製、包裝袋折角定位機構的控製、包裝袋折角氣缸的控製、氣缸關閉包裝袋的控製。根據包裝袋折邊折角作業機械手需要實現的動作順序,繪製的PLC控製流程如圖6所示。
4.5PLC編程與調試
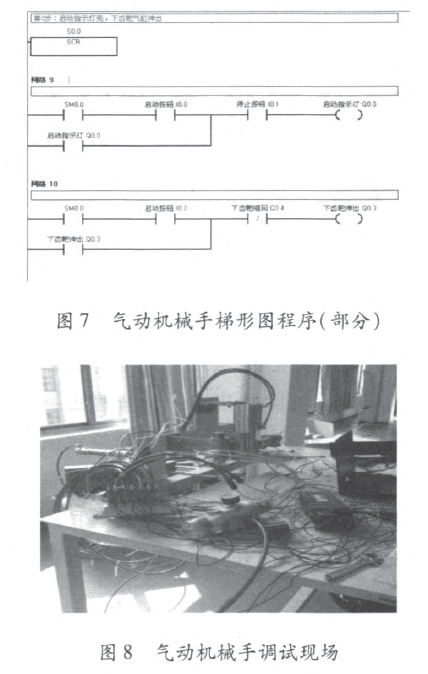
根據PLC控製流程,使用西門子STEP7編程軟件進行編程。本文選用梯形圖進行編程,編程思路如下:為了保證係統的安全運行性,在編程時應設置一些必要的互鎖,比如在兩位五通雙控電磁閥左線圈得電時右線圈不能同時得電,橫向移動氣缸和縱向移動氣缸控製的折角定位機構運動在沒有退出的時候,上吸盤氣缸不能伸出等。另外,如當按下停止按鈕的時候可馬上停止動作,按下回原點複位按鈕的時候可立即使各氣缸回原點複位。氣動機械手部分梯形圖程序如圖7所示。包裝袋折邊折角作業機械手調試現場如圖8
5結束語
包裝袋折邊折角作業機械手與人工操作折邊折角作業相比有如下優點:機械手操作靈活,折邊折角效率更高,減少了勞動力;對操作工人技術水平要求不高;經過對包裝袋折邊折角作業機械手進行現場調試,證明了本機械手控製係統能夠完成預定的功能,並且包裝袋折邊折角效率高,合計14.5個/min,可靠性高達99%。該機械手節省了人力,節約了成本,提高了企業競爭力,有十分廣闊的市場應用前景。
作者:劉誌虎,王雷,王幼民,李明
深圳市k8凯发版官网儀器有限公司是一家專門從事稱重儀表和全自動包裝碼垛生產線的研發及生產的高新技術企業,所生產的JY500係列稱重顯示控製器(包括配料秤儀表、皮帶秤儀表、包裝秤儀表、重量變送器等)高速高精度,使用壽命長。k8凯发版官网儀器有十數年的現場校驗經驗,在業內有良好的口碑,且有專門的售後工程師幫忙解決產品使用過程中遇到的技術問題,客戶可以放心省心順心的使用我司的產品。如果對我司的產品感興趣,歡迎谘詢。
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器