谘詢電話
ENGLISH0755-88840386糧食碼垛機器人的設計
發布時間:2021-03-31 14:53:42 |來源:網絡轉載
引言
在熱炒的工業4.0時代,在以勞動密集型為主導的中國製造也悄然發生著變化,如富士康大舉引入工業機器人、東莞製造業大規模引進機器人生產等等。工業機器人能適應基本的運動要求,同時能耐高溫、耐腐蝕,能適應各種的工作環境,像日本核電站泄漏事件也是有探測的機械人經過遠程控製進入現場勘查。通過綜合機械結構、感應器控製器和伺服係統,實現機電一體化自動生產的功能並可重複編程,實現了一係列動作的自動化和快速響應,不僅大大地提高了產能,而且進一步的使工人的勞動強度在合理範圍,改善勞動條件,大大地降低生產成本。
碼垛機器人是工業機器人中一種重要類型,所謂碼垛,是指按照集成單元化思想,將一件件的物品按照一定的形式堆碼成垛,以便使單元化的物垛完成對物料的搬運、裝卸、運輸、存儲等物流的活動。從碼垛的概念我們可以知道,碼垛技術就是實現了“物流”自動化,通過驅動元件使末端裝置到達指定位置,而後按照設定的指令使末端裝置運動,抓取目標物件並使它的空間位置發生轉移從而實現碼垛的自動化。在倡導工業產能升級的今天,碼垛技術有著極其重要的位置,碼垛機器人的反應是否靈活快速、是否穩定可靠、是否結構輕便、信息能否傳達到大的統籌係統當中,這都是實際生產中要考慮的問題。
1碼垛機械手的方案設計
本次設計根據生產實踐出發,大型糧庫中袋裝大米重量達30到50kg,如此這般的重複勞動,使得工人的勞動量將很大。采用機器人技術,實現搬運的自動化將大大地提高生產效率、節省人工成本,實現搬運操作的柔性自動化,以提高生產效率。
本設計主要是研究碼垛機器人的結構設計,主要工作內容有以下幾點:
1)了解搬運機器人發展曆程、現狀以及未來發展趨勢,掌握碼垛機器人的機械結構特點以及基本構成部分。
2)對碼垛機器人的總體方案進行設計,方案確定後,對各個細節進行設計。包括腕關節電機、軸承、減速器的選擇;臂部材料的選擇、結構的設計、受力分析、關節處銷軸的校核、關節軸承的選型;傳動係統的設計:電機、同步帶、軸承的選型,滾動絲杠、滑動導軌的選型與校核;腰部電機、減速器、軸承型號的選擇:抓手的運動形式、握緊力計算、驅動氣缸選擇。
3)機械本體的運動分析與執行末端的中軸線始終垂直及執行末端的結構設計。
目前,我國采用的碼垛機器人的主要結構形式有直角坐標型和關節型。直角坐標為四軸機器人,通過電機轉動帶動同步帶運動,繼而帶動直線導軌上的滑塊運動。它具有定位精度高、便於空間軌跡求解、控製簡單的特點,但相應的是運動速度較低、操作靈活性差、占用工作空間大而相對工作範圍小的不足。與之相比,關節型機器人有著更大的動作空間、占用空間小、有著更高的適應能力和更廣的應用範圍。
考慮夾取的糧袋的大小和適用環境,決定采用關節式機器人,來實現30到50kg重量的糧袋的上下料。參照日本某公司的碼垛機器人工作過程與運動過程,選用以下方案:采用平行四邊形機構的原理保證手腕的軸線垂直,大、小臂則由絲杠平台帶動。選定好伺服電機,通過同步帶輪使絲杠轉動。同步帶的選用很大程度上減少了空間體積,也使得機械手更加靈活可動。絲杠平台則安放在一個支架上。夾持末端則考慮選用兩端安置氣缸作為動力裝置。對於位置確定,擬在底座安放一個位置檢測感應器來感應物品,抓手位置的氣缸則需要安裝磁感應開關,反饋氣缸位置信息。係統初定為基於PLC的設計。
如圖所示,選取該機構形式進行設計。
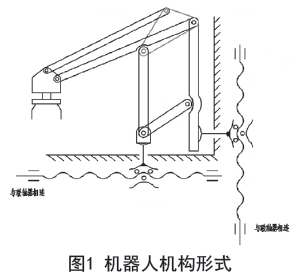
總體設計思路:
本文中的機器人設計運動範圍可達1.8米,腰部、腕部可以回轉330°,運動組成還有大臂的上下運動、小臂的前後運動。驅動原件選用伺服電機驅動,抓手的驅動部件則選用氣缸,以使結構更加的簡化並使重量得到輕化。
腕部的設計關鍵是要保證其軸線始終垂直,並要選用較輕的電機,由於需要的轉速低且所需轉矩不高,可選用的電機類型較多。
機械手臂為主要承載,選用8mm鋼板焊接而成,主要受力的大臂中間還焊接有4mm方形鋼管。小臂在與前後大臂軸連接處各焊接一個襯套,以此保證運動的平穩性,最終通過軸承與大臂連接。軸承選用圓錐滾子軸承和深溝球軸承。
考慮運動的穩定性和可靠性,需要做的工作有:對絲杠、導軌的選用和校驗;銷軸的計算與選用。
腰部選用中低速電機,根據運動特性選用推力球軸承。
2碼垛機器人腕部和腰部設計
碼垛機器人腕部設計:
腕部直接承受執行末端負載的重量,伺服電機接減速器為末端變化位姿傳送動力,減速器接法蘭連接盤。由腕部托架為支撐,軸連接處為拉架軸。
3機器人手臂的結構及其驅動係統設計
3.1機構的受力分析
在運動過程中,H方向的絲杠副主要受到摩擦力的影響,V方向的則是受到來自Z軸方向的力。當出現如圖所示的運動狀態,及當AC垂直BF且AC垂直CB時,兩滾珠絲杠副承受的載荷最大。AC為小臂,BF、CB為前後大臂。
腕部直接承受執行末端負載的重量,伺服電機接減速器為末端變化位姿傳送動力,減速器接法蘭連接盤。由腕部托架為支撐,軸連接處為拉架軸。
3機器人手臂的結構及其驅動係統設計
3.1機構的受力分析
在運動過程中,H方向的絲杠副主要受到摩擦力的影響,V方向的則是受到來自Z軸方向的力。當出現如圖所示的運動狀態,及當AC垂直BF且AC垂直CB時,兩滾珠絲杠副承受的載荷最大。AC為小臂,BF、CB為前後大臂。
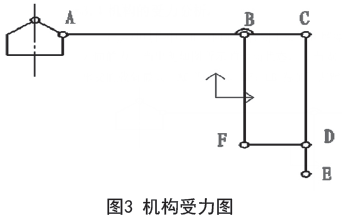
根據實際的工作需要我們設計相關的數據為AB=1170,BC=260mm,CD=1080mm,DE=240mm,點A到五邊形的中心線長度為d=150mm。
在上圖的符號當中我們把G1定為電動機及負載的重力總和,碼垛的物品最大達到50KG,腕部的部件重力達到100N,M則為圍繞點A的電機與負載的轉矩總和M=G1×d=200×150×10-3=90N·m,小臂選用的材料為Q235,重量達到400N。
3.2手臂關節軸承的選型與校核
手臂由於承受的載荷很大,所以手臂需要設計成剛度大,以保證運動的可靠性,還有由於小臂的較好的運動響應,則需要設計成為重量較輕,這就要求我們選取小臂的截麵形狀,以保證小臂能選取到較大的剛度並防止小臂發生彎曲變形。同時,我們根據實際的工況,相應地設計手臂的懸伸部分。
通過小臂剪力圖可以知道當往B靠近時,小臂的彎矩就越來越大,所以在所結構的設計當中,往B點靠近的部分要增大尺寸,而其他的部分則采用均勻餓的的尺寸分布。B點選用銷軸方式作為聯接,銷軸的承受載荷就很大,所以必須對它進行校核,以保證運動的可靠性,穩定性和耐用性。
根據《機械設計手冊》及相關資料的查詢,我們選用的軸承為自潤滑向心關節軸承,它的特點是既能承受徑向載荷,同時還能承受另外一個方向較小的軸向載荷。根據相關的技術要求選軸承的型號為GE25ES-2RS,當中d=25mm。
4豎直滾動導軌副的計算選型
直線滾動導軌副的設計需要考慮工作載荷,它除了保證工作的可靠性,還關係到導軌副的工作使用壽命。通常我們布置平台采用的為雙導軌,一導軌上有兩個滑塊的形式。考慮最為極端的情況時,一個滑塊承載所有的工作載荷,這時我們對垂直方向的載荷進行分析:
![]()
式子中:F=F2;
G=800N。
(F為外加載荷、G為移動部件的重量總和)將相關的數值代入(4-12)可以得到:
![]()
根據計算結果,考慮工作載荷承受狀況,選用型號為SBSF20V滾動導軌,額定動載荷Ca=7.81kN,額定靜載荷Coa=13.78kN。考慮滑塊的尺寸大小和導軌的承受載荷能力,確定導軌的長度為820mm。
根據經驗設計,導軌的預期額定壽命是50km,實際的計算數值206.01km遠遠大於額定值,故可以得知所選的導軌符合設計要求。
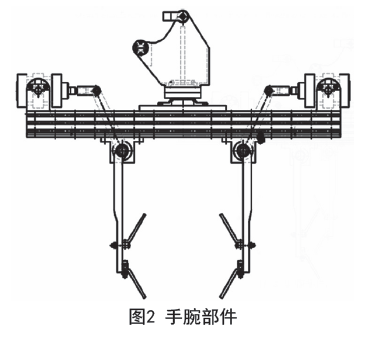
5末端裝置設計與計算
傳統的機械式和液壓式的抓手結構複雜,重量較大,而氣動驅動的機械手則有美觀和輕巧的優點,而且價格便宜,能更好的組合到末端裝置上,具有穩定性和可靠性。
根據氣動機械手的手部結構,設定其工件的質量G=50kg,“V”形抓塊的角度2θ=120°,b=400mm,a=230mm,摩擦係數經過查表可知:f=0.1。
(1)的模式是手部垂直抓取,根據傳動的示意圖可以知道,它的驅動力為:
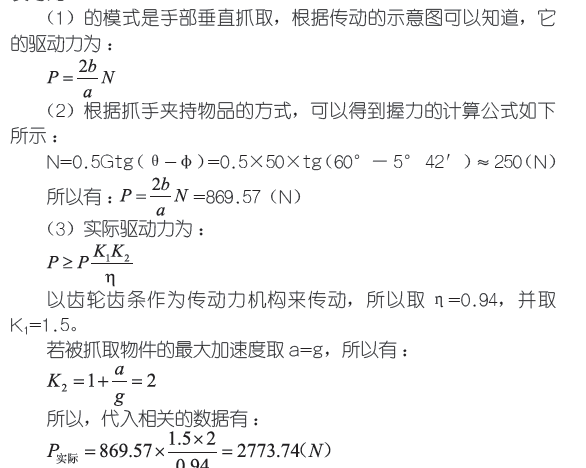
從計算結果可以知道夾持物件所需要的夾緊狀態需要氣缸的驅動力為2773.74N。
6總結
本設計是關於新型智能糧食碼垛機械手的設計,對於碼垛機器人,根據其工作要求,在設計時重點是要注意機械手的自由度,保證它的靈活性,滿足抓取、碼垛、和上下料等作業,操作過程是由2種氣缸組成執行機構作為驅動,係統可采用可編程控製,程序簡單且便於調試。機械手可在空間抓、放、搬運物體,動作靈活多樣,適用於可變換生產品種的中、小批量自動化生產,可以廣泛地應用於柔性自動線上。機械手多半由耐高溫,抗腐蝕的材料製成,能適應較為惡劣的現場環境,大大降低了工人的勞動強度,提高了工作和生產效率。
作者:廖奇
深圳市k8凯发版官网儀器有限公司是一家專門從事稱重儀表和全自動包裝碼垛生產線的研發及生產的高新技術企業,所生產的JY500係列稱重顯示控製器(包括配料秤儀表、皮帶秤儀表、包裝秤儀表、重量變送器等)高速高精度,使用壽命長。k8凯发版官网儀器有十數年的現場校驗經驗,在業內有良好的口碑,且有專門的售後工程師幫忙解決產品使用過程中遇到的技術問題,客戶可以放心省心順心的使用我司的產品。如果對我司的產品感興趣,歡迎谘詢。
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器