谘詢電話
ENGLISH0755-88840386基於嵌入式ARM的肥料包裝機控製係統的研究
發布時間:2021-03-17 15:15:41 |來源:網絡轉載
0引言
目前,農業肥料的種類越來越多,包括有機肥、複合肥、磷銨、大顆粒尿素、多孔硝胺、重鈣、BB肥、磷肥、鉀肥及各種混配肥等,包裝的市場越來越大,越來越多的肥料生產企業選擇使用肥料包裝機包裝生產。傳統的肥料包裝機側重於機械方麵,采用螺旋傳動,生產效率低下,運行過程中易擠死,造成停車故障,且維護不方便,稱量不準確,包裝過程常常取決於操作人員的經驗。為此,以嵌入式ARM為主控製器,研發了一套肥料包裝機控製係統,旨在提高肥料包裝的精準度和效率。
1肥料包裝機結構與工作原理
1.1整體結構
肥料包裝機用於有機肥料的自動包裝,包括機械結構和控製係統兩部分。其中,機械結構功能是為包裝作業流程提供結構支撐,主要包括供料、上料、定量給料、秤鬥、打料電機、橫封、縱封、送料機、傳送係統、送膜與拉膜傳動結構、打印機構等單元;控製係統用於操縱整個機器的正常運作,主要包括信號采集電路、核心處理器、伺服電機、人機交互等。肥料包裝機整體機械結構如圖1所示。
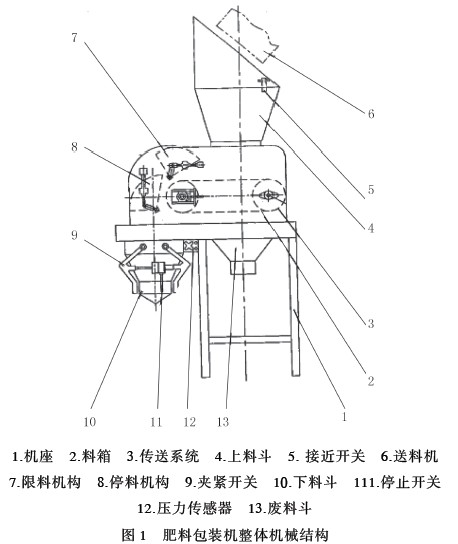
肥料包裝機開始工作時,送料機將待包裝的肥料原料送入到上料鬥,接近開關監測到上料鬥內物料,便開始向下傳送物料,在料倉內由定量給料機進行精準給料處理;經過秤鬥的精確計量後,當符合質量誤差範圍後,使物料由下料鬥卸到包裝袋內,最後由橫封、縱封完成封口操作。肥料包裝機實物圖如圖2所示。

1.2執行結構設計
肥料包裝機機械執行結構主要包括計量機械裝置、橫封與縱封裝置、送膜與拉膜傳動機構、氣動控製模塊等4部分。其中,重要的部分為計量機械裝置和氣動控製部模塊。
1)計量機械裝置。定量給料機由數字顯示表、標定及調校設施、秤架、稱重傳感器、速度傳感器、配料秤的密封罩、支撐架、變頻調速電機、控製器等組成。
定量給料機的工作原理為:首先由稱重傳感器測量稱重秤架上的物料質量,測速傳感器測量傳送帶的轉動速度,然後將兩個信號送入微處理器,計算出肥料包裝的累計量和瞬時K8凯发登录入口,由處理器將該K8凯发登录入口與設定K8凯发登录入口進行比較,最後微處理器輸出信號控製變頻器調速,達到定量給料的要求。該設備的優點為:結構簡單,精度較好,投資較低,維護成本低,調校容易;缺點為:密閉性差,易漏料、揚塵,造成環境汙染。
2)氣動控製模塊。該肥料包裝機多處運動部件采用氣動動力驅動,具有動作快捷、結構簡單及維護方便等優點。工作時,嵌入式控製係統進行實時控製,氣缸工作壓力可通過氣源三聯件無級調整,氣缸動作速度可通過節流閥快速調整。
2肥料包裝機伺服傳動的數學模型
肥料包裝機采用定量給料機進行供料,而定量給料機的核心是伺服傳動控製。肥料包裝機伺服傳動的原理為:在伺服驅動器速度控製模式中,通過對比伺服驅動器速度輸出UP及通過質量增加推算到的電機轉動速度UG,計算後得到ΔU=UP-UG;經過嵌入式控製器進行轉換後,得到嵌入式控製器輸出PWM脈衝信號和伺服驅動器的電樞控製電壓U。在整個速度控製器的控製係統中,包含比例係數kA,其傳遞函數表達式為
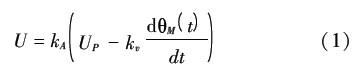
其中,θM(t)為伺服電機的角位移量;kv為速度控製環的增益值。
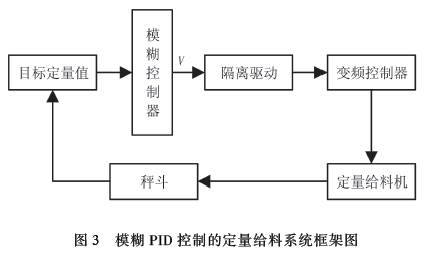
為了實現對伺服驅動器的動態控製,結合嵌入式控製和模糊PID技術,在包裝機ARM控製係統上應用模糊PID控製算法,目的是將被控對象的控製量進行等級離散化,利用PID的良好靜態控製效果,在線對PID參數進行修改。定量配重係統模糊PID控製的功能是根據目標定量值和稱重秤測得實際值去控製電機的轉速,從而實現定量給料係統的精準計量。模糊PID控製的定量給料係統如圖3所示。
定量配重係統的主要任務是在計量精度滿足要求的前提下,加快包裝速度。但是,定量給料機轉動的速度越快,單位時間內下的物料會越多,計量精度也就會越低。因此,計量精度和電機轉動速度是一對矛盾體,需要模糊自適應整定控製器動態進行調節。
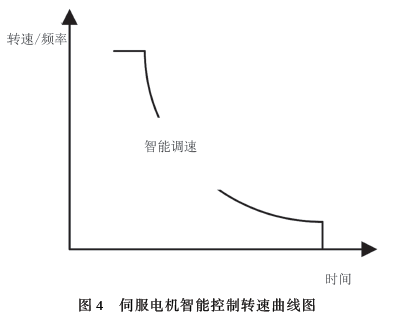
本文以每袋產品包裝質量是50kg、精度要求為±0.2%為例進行設計。由於包裝下料是一個單向逼近式的過程,根據要求係統采用粉料動態快速測量及自校準技術,引入閉環複合無級調速方法,根據稱量質量進行實時高精度控製。此外,係統無級調速裝置可提高包裝速度,在質量達到目標值的90%(即45000g)時前,全速加料;到限量時,根據經驗曲線和稱量值,智能逐步減少加料速度,直至加料過程完成。控製電機轉速與時間曲線如圖4所示。
3肥料包裝機控製係統的設計
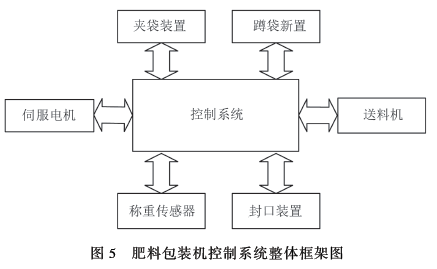
肥料包裝機控製係統的核心主要負責整個係統的開啟、關閉、采集秤鬥質量信息和控製各個傳感器的開關等,以協調各個機械裝置的正常運轉。肥料包裝機控製係統整體框架如圖5所示。
1肥料包裝機控製係統硬件設計
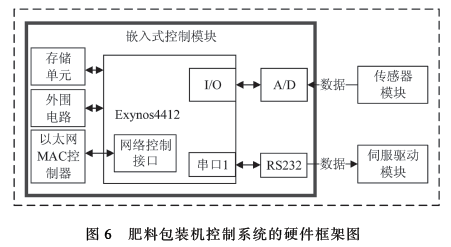
1)嵌入式ARM處理器。肥料包裝機控製係統的硬件部分主要由嵌入式控製模塊、傳感器模塊和伺服驅動模塊等組成,嵌入式控製模塊采用ARMCortex-A9內核體係的四核微處理器Exynos4412。肥料包裝機控製係統硬件框架如圖6所示。
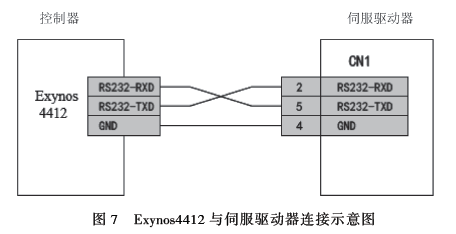
2)伺服電機。肥料包裝機控製係統要求對伺服電機轉速具有非常高的控製精度,本文采用HSV1-120-F3伺服驅動器,其額定輸出為1.5kW,輸入電源為AC380V。Exynos4412微處理器采用RS232接口和伺服控製器進行操作的指令轉換,控製方式單一,穩定性高。Exynos4412與伺服驅動器連接示意如圖7所示。
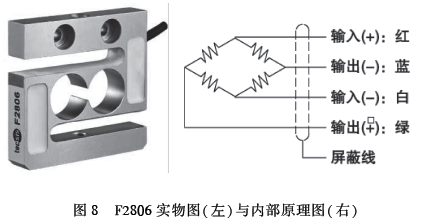
3)稱重傳感器。稱重傳感器模塊是肥料包裝機控製係統中的核心部件,其精準度、靈敏度對係統的性能結果具有重要的影響。稱重傳感器主要由彈性敏感元件和電阻應變計組成:前者主要是將肥料的壓力轉化為彈性體的應變值,後者則是將前者的應變值實時轉換為電阻變化值。稱重傳感器的工作原理是:由彈性敏感元件和電阻電橋將物體的質量轉換為可以測量的微弱電信號。
根據設計需要,稱重傳感器選用的是美國某公司的拉壓雙向的F2806係列稱重傳感器,采用合金鋼材料製造,矽橡膠密封,表麵陽極化,耐腐蝕性好。F2806最大量程範圍為1~200kg,適合多種精度等級的工業測量係統。F2806實物圖與內部原理圖如圖8所示
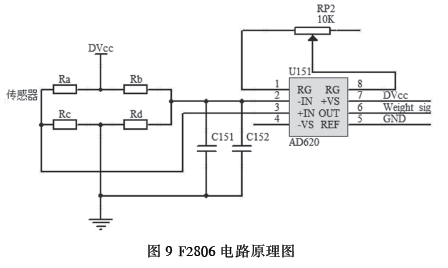
係統中稱重傳感器電路采用並聯方式,並聯方式可以大大降低器件輸出阻抗,提高整個係統的抗幹擾能力。F2806電路設計如圖9所示。
3.2肥料包裝機控製係統軟件設計
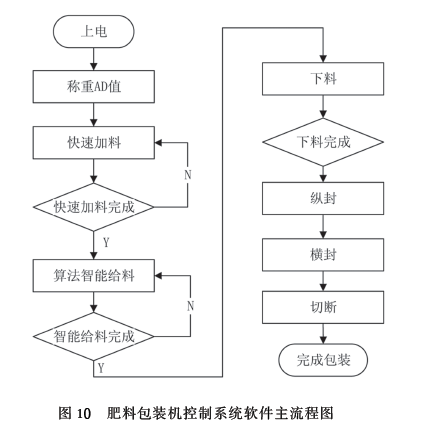
肥料包裝機控製係統采用PID多級智能給料方式,給料係統采用肥料動態快速測量及自校準技術,引入閉環複合PWM調速方法,根據稱量質量進行實時高精度控製。此外,研製了伺服調速裝置提高包裝速度:在達到限量前,全速加料;到限量(快接近總量)時,根據經驗曲線和稱量值,智能逐步減少加料速度,直至加料過程完成。肥料包裝機控製係統軟件主流程如圖10所示。
4實驗結果與分析
為了驗證肥料包裝機控製係統的精度值和可行性是否滿足設計需求,進行了肥料包裝實驗,包裝定量值設定為25kg。實驗前,準備1台Exynos4412嵌入式控製係統,其固化了采用模糊PID控製的定量配重程序。另外,準備1台量程為100kg、精度為0.001kg的靜態電子台秤,為包裝成袋的產品進行複秤。包裝結束後,隨機抽取了5包包裝完成的肥料進行了複秤,結果如表10所示。
在實驗中,所選取的5包肥料中,複秤的偏差值均在±0.2%以內,精準度較高,滿足係統精度要求。
5結論
基於ARMCortex-A9內核體係的四核微處理器Exynos4412,設計了肥料包裝機控製係統,從肥料包裝機的結構設計、伺服傳動的數學模型,到Exynos4412嵌入式的軟硬件設計進行了多方麵的研究。為了驗證該控製係統的精確度和可行性,對基於嵌入式ARM的肥料包裝控製係統的精確度進行了測試,結果表明:係統包裝的偏差值均在±0.2%以內,精準度較高,滿足係統精度要求。
本文源於網絡轉載,如有侵權,請聯係刪除
深圳市k8凯发版官网儀器有限公司是一家專門從事稱重儀表和全自動包裝碼垛生產線的研發及生產的高新技術企業,所生產的JY500係列稱重顯示控製器(包括配料秤儀表、皮帶秤儀表、包裝秤儀表、重量變送器等)高速高精度,使用壽命長。k8凯发版官网儀器有十數年的現場校驗經驗,在業內有良好的口碑,且有專門的售後工程師幫忙解決產品使用過程中遇到的技術問題,客戶可以放心省心順心的使用我司的產品。如果對我司的產品感興趣,歡迎谘詢。
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器