谘詢電話
ENGLISH0755-88840386皮帶秤動態稱重用神經網絡算法設計
發布時間:2020-09-29 10:44:02 |來源:
1引言
皮帶輸送機是散裝物料常用的運輸設備,通常采用電子皮帶秤在物料的運輸過程中完成對物料的累計計量。相對於靜態計量設備,電子皮帶秤難以滿足貿易結算、能源計量、節能減排等等較高精度的應用要求。
目前對於稱重的研究重點基本集中在“皮帶效應”,根據經驗對某一個或某幾個敏感參數進行線性補償;或者通過對皮帶的特性進行力學分析,嚐試建立簡化的力學模型在理論上對誤差進行計算和補償。但實際皮帶秤作為為動態累計計量設備具有更高的計量效率,但同時電子皮帶秤計量精度普遍不高、耐久性差,國際建議OIMLR502014(E)將皮帶秤劃分為0.2、0.5、1.0和2.0這4個準確度等級[2]。由於受到被稱物料的K8凯发登录入口、速率、環境以及隨時間累積的皮帶蠕變等因素。
電子帶秤在工作時,皮帶秤稱重誤差影響因素眾多,並且呈現非線性和相互作用,所以僅用理論分析試圖找出其規律、追求精細化補償模型相當困難。也有學者將人工智能理論、機器K8凯发大酒店天生赢家等新興技術都引入到了傳統的動態稱重領域,不過將機器K8凯发大酒店天生赢家應用於優化電子皮帶秤的動態稱重精度的研究目前較少。
本文引入過程神經網絡提高皮帶秤動態稱重精度,增強了皮帶秤的耐久性,同時給出了皮帶秤的耐久性考核方法。
2過程神經網絡模型參數確定
2.1過程神經網絡
隨著計算機技術、人工智能技術在各行各業的成熟運用,國內外越來越多的研究將神經網絡這一機器K8凯发大酒店天生赢家理論引入動態稱重誤差建模和校正補償[5]。神經網絡利用物理器件來模擬生物神經網絡的結構和功能,將多個神經元按照一定的網絡拓撲結構組合起來對分布式信息實現並行處理,從而得到一個描述係統輸入、輸出關係的非線性映射[6]。
基於神經網絡理論的運用,對影響皮帶秤動態稱重精度的誤差源進行分析,挖掘關聯性,提取參數特征,通過適當標定獲取皮帶秤運行過程中與稱重結果可能有關的數據,再利用神經網絡等機器K8凯发大酒店天生赢家方法尋求可用、可靠的經驗關係,相比理論分析更具有可行性和實用性。
傳統的人工神經網絡都是網絡輸入與時間無關的模型,而皮帶秤在運輸過程中,稱重區間的稱重傳感器會連續地得到稱重段皮帶上物料的重力信號,這個信號的連續變化貫穿物料運輸的始終。因此很難找到一個合適的數據作為神經網絡的輸入信號。在人工神經網絡的發展中,有學者提出過程神經網絡的理論,並證明了理論的可行性[7]。過程神經網絡是人工神經元網絡在時間域上的擴展模型,其輸入是與時間相關的量,輸出是靜態的量,這種過程式的輸入、靜態的輸出剛好與皮帶秤的輸入輸出形式相符合,因此過程神經網絡相比傳統的人工神經網絡更適合用於改善皮帶秤動態稱重精度的研究。
2.2皮帶秤工作原理
目前的皮帶秤主要通過積分法來獲取物料的累計重量:當輸送帶把物料輸送到稱量段上時,稱重傳感器和測速傳感器分別測得稱量段上的瞬時重量Wl(t)/kg和同時刻輸送帶的瞬時速度v(t)/
m·s-1,假設稱量段長度為l/m,整個稱重過程時長為T/s,則所輸送物料的累計重量I為[8]:
I=∫TWl(t)v(t)dt
秤稱重誤差的重要因素,對稱重結果的影響無法消除,且隨著稱量段物料的改變實時變化,故直接測量皮帶張力難度較大。專家和學者對皮帶秤張力檢測方法進行過大量研究,發現垂度變化和張力變化具有強相關性,比較實用的是建立張力和垂度間的關係,通過監測稱重托輥間皮帶垂度變化來間接反映皮帶張力變化[8,9]。垂度變化指稱重過程中稱重托輥中點處皮帶相對於其空載時的下垂量,如圖2所
示,垂度變化量Δh=hh0,其中h0為空載時皮帶垂度,h為加載物料時皮帶垂度。
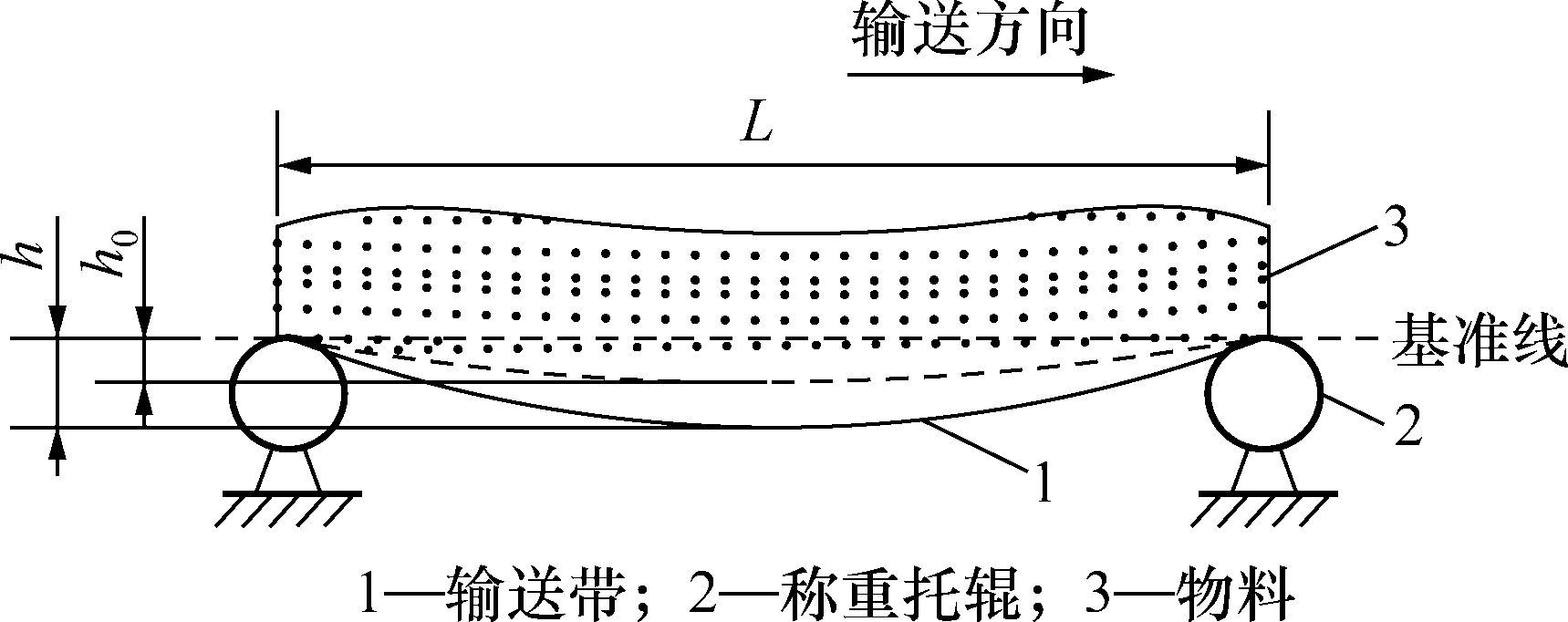
圖1垂度變化示意圖
Fig.1Schematicdiagramofvariationinbeltsag
結合對皮帶秤稱重原理分析,將單位長度上的重量、皮帶速度、皮帶垂度變化選為輸入,將累計物料的實際重量(靜態稱量獲得)作為輸出,構建一個3輸入、單輸出、含有一個隱含層的過程神經網絡。
3過程神經網絡算法設計
過程神經網絡中采用過程神經元代替傳統的神經元,過程神經元由加權、聚合和激勵3部分組成[9],是對傳統神經元的聚合運算機製和激勵方式向時間域進行擴展,使神經元同時具有時、空二維信息處理能力。單個過程神經元如圖2所示。
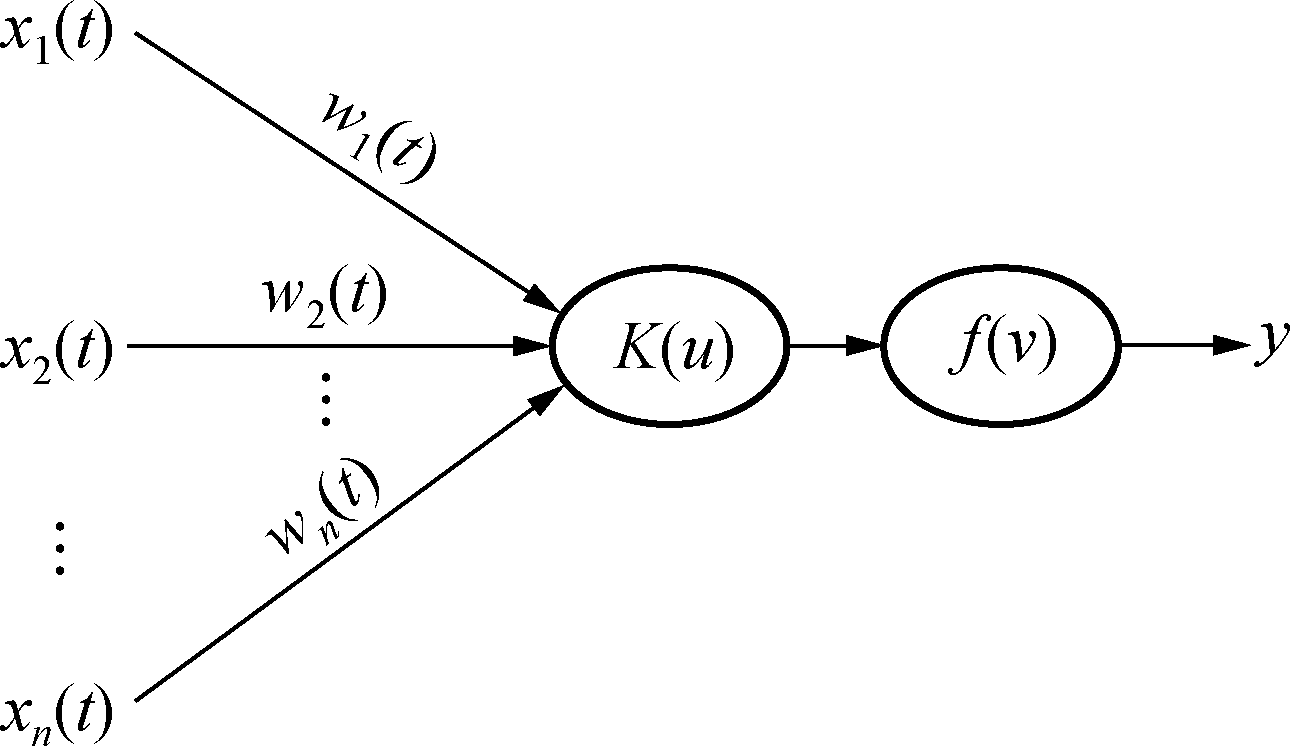
圖2單個過程神經元示意圖
Fig.2Schematicdiagramofsingleprocessneuron
圖2中,x(t)為輸入向量,w(t)為權值函數,
K(u)為時間聚合函數,f(v)為激勵函數,其中輸入0l
2.3模型參數確定
皮帶張力是皮帶秤的基本屬性,又是導致皮帶向量和權值函數皆是一條與時間t有關的向量序列,時間聚合函數一般為積分的形式。圖2中過程神經元輸出為:
y=f∫T∑n
w(t)x(t)K(t)dt-θ
(1)
x(t)=∑
xp·b(t)
式中:θ為神經元閾值;T為輸入量持續時間;n為由於b(t)是正交基函數,所以有:
輸入量數量。
與傳統神經元不同之處在於過程神經元的輸入和權值可以是時變的,其聚合運算既有對空間的多
∫Tbl(t)·bp(t)dt=
則網絡輸出改寫為[14]:
1l=p
0l≠p
輸入匯聚,亦有對時間過程的累積。
nmL
y=g∑ωkjf∑∑w(jil)·x(il)
-
θj
-
b
與傳統人工神經網絡相同,由若幹個過程神經
元按一定的拓撲結構組成的網絡稱為過程神經元網
j=1
i=1
l=1
(3)
絡。一個多輸入單隱層單輸出神經網絡的拓撲結構如圖3所示。
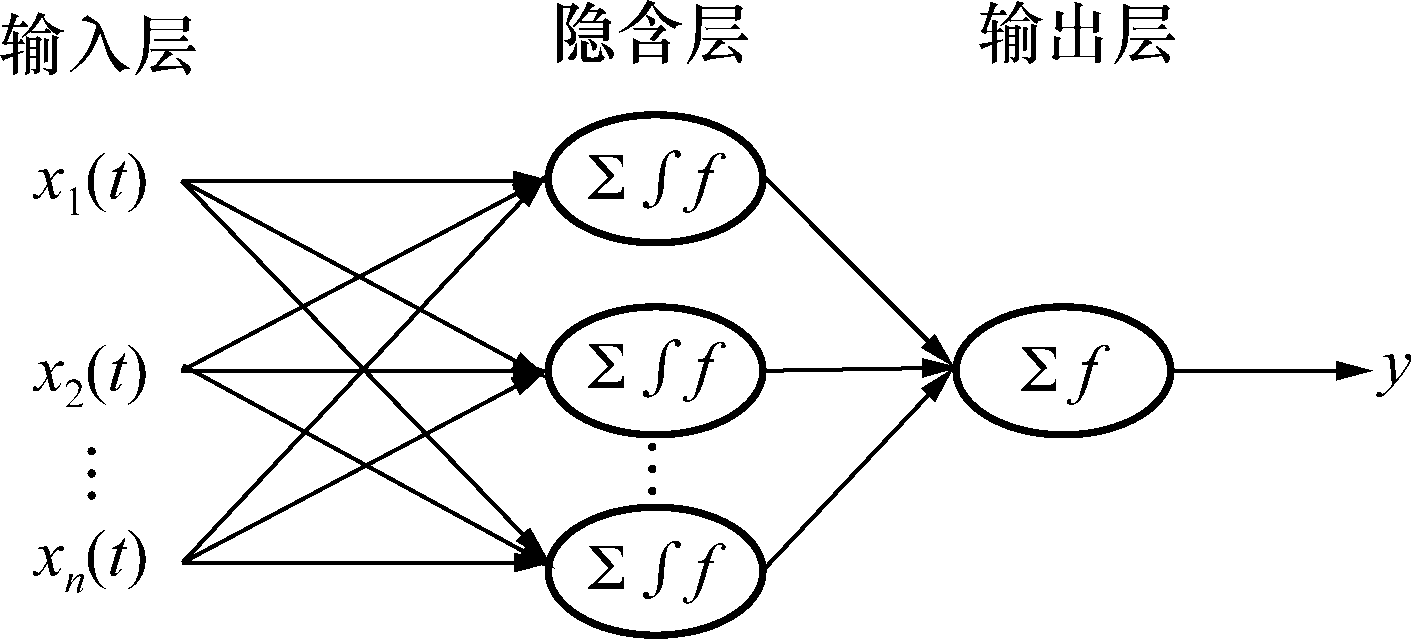
圖3神經網絡的拓撲結構圖
Fig.3Topologyofneuralnetworks
若以m個輸入層神經元,n個隱含層神經元,1個輸出層神經元為例,則過程神經網絡的輸入輸出關係為:
由式(3)中可見,經過在正交基底下展開的過程,將積分的運算轉化為m×L項相加,因此簡化了積分過程的運算,隻要調整隱含層神經元數量m和權值基函數數量L就能改變積分運算的複雜程度,摸索合適的網絡模型規模就更為方便了。
基於前人的研究經驗,本研究將輸入函數和權
值函數通過FFT(快速傅裏葉變換)在三角函數基底下等精度展開,得到式(3)所述的輸入輸出關係。網絡權值更新方法基於已廣泛使用的BP神經
網絡算法的梯度下降法[15,16]。
給定K個K8凯发大酒店天生赢家樣本,設輸出真值為dk,則網絡訓練誤差為:
E=1K2
y=g∑j=1wkj·
則有:
2∑k=1(ykdk)
f∑∫T∑L
w(l)b(t)x(t)dt-θ-b
(2)
w(jil)
=w(jil)
+ηΔw(jil)
i=10
l=1jilij
式中η為K8凯发大酒店天生赢家速率。
式中:g()為線性函數;f()為sigmoid函數;k為輸出
Δw=-E=-
(yd)·f(u)
層神經元;bl(t)為權值基函數,即將權值函數w(t)改寫為以權值基函數為基底展開的形式;L為基值
kj
其中:E為誤差;
wkj
∑k=1kk
函數數量;b為輸出層閾值。mL
u=∑∑ω(jil)·x(il)θj;
過程神經網絡與傳統神經網絡相比,有一個額
外的積分過程,但由於輸入信號為離散采樣的數據序列,並不是已知解析表達式的連續信號,所以積分
隻能通過數值計算實現。實際應用中,當采樣率較
i=1l=1
Δw(jil)=-E
ji
Δθ=-E=
=-(ykdk)·ω·kjf′(u)·x(il);
k=1
(yd)·w·f′(u)。
高時,樣本的數據量極為龐大(上10萬個數據點),
jθj
∑k=1kkkj
這種情形下,如果采用直接累加的方式計算積分,不僅計算量龐大,耗時較長,而且由於係統的輸入是由
具體問題確定的,權函數的形式具有任意性,因此在訓練中存在不穩定性,且計算複雜度高[10]。
為了解決這一問題,有學者發現,將輸入函數和權值函數在同一正交基底下等精度展開,能夠避免冗餘的疊加,還會使網絡的K8凯发大酒店天生赢家速度明顯加快[11]:
將權值函數和輸入函數在同一個正交基底下展
開得[12,13]:
由於f(u)為sigmoid函數,所以有:
f′(u)=f(u)·(1-f(u))算法描述如下:
Step1:給定誤差精度e;累計K8凯发大酒店天生赢家迭代次數q=0;K8凯发大酒店天生赢家最大迭代次數M;選取權值基函數b(t)個數L,l=1,2,3,…,L。
Step2:初始化權值和閾值。
Step3:計算誤差函數E,如果E<e或q>M轉
Step5。
wlStep4:修正權值和閾值;q+1→q;轉Step3。
ji(t)=∑l=1wji·bl(t)
Step5:輸出K8凯发大酒店天生赢家結果,結束。
4算法仿真驗證
次K8凯发大酒店天生赢家之後誤差下降速度逐漸放緩,直到第100次K8凯发大酒店天生赢家時誤差已降到0.1,又經過了49次K8凯发大酒店天生赢家將網絡誤差優化到網絡K8凯发大酒店天生赢家誤差精度要求。
在實驗室裏搭建實驗係統,進行數據采集實驗共獲得18組數據,每組數據包含可能影響皮帶秤稱重精度的3個關鍵因素:單位長度上的重量、皮帶速度、皮帶垂度變化,采樣速率為2000Hz,平均每組數據有50萬個點位,18組數據中,前14組加上空載運行數據組成共15組數據作為訓練組,後4組數據作為測試組。
將單位長度上的重量、皮帶速度、皮帶垂度變化作為3個輸入層神經元的輸入,選取隱含層神經元數目為5個,權值基函數數目為128個,網絡誤差精度0.001,仿真程序在matlab環境下編寫和調試。讀取數據後,對數據進行預處理:截取稱重時段內的數據以減少總體數據量;根據一定的算法通過速度信號(信號為周期性脈衝形式)計算皮帶速度;將重量信號、速度信號、垂度變化信號進行給定精度下的FFT(快速傅裏葉變換)處理。
由式(3)可知,將權值函數和輸入函數在正交基底下展開後,網絡輸出關係式中可以看到,輸入層到隱含層的權值數量為m×n×L,因此在matlab中定義三維矩陣用以存儲輸入層到隱含層的權值,定義二維矩陣儲存隱含層到輸入層的權值和隱含層的閾值,實際研究中發現輸出層閾值對網絡收斂性影響過大,固未使用輸出層閾值b。首先遵循BP神經網絡的方法將權值閾值初始化,初始化結果為將訓練組輸入數據代入訓練完成後的模型,所得模型輸出與訓練組實際輸出數據對比如圖5所示。
由圖5可以看出訓練完成後的模型擬合效果較好,網絡輸出與實際輸出幾乎一致。
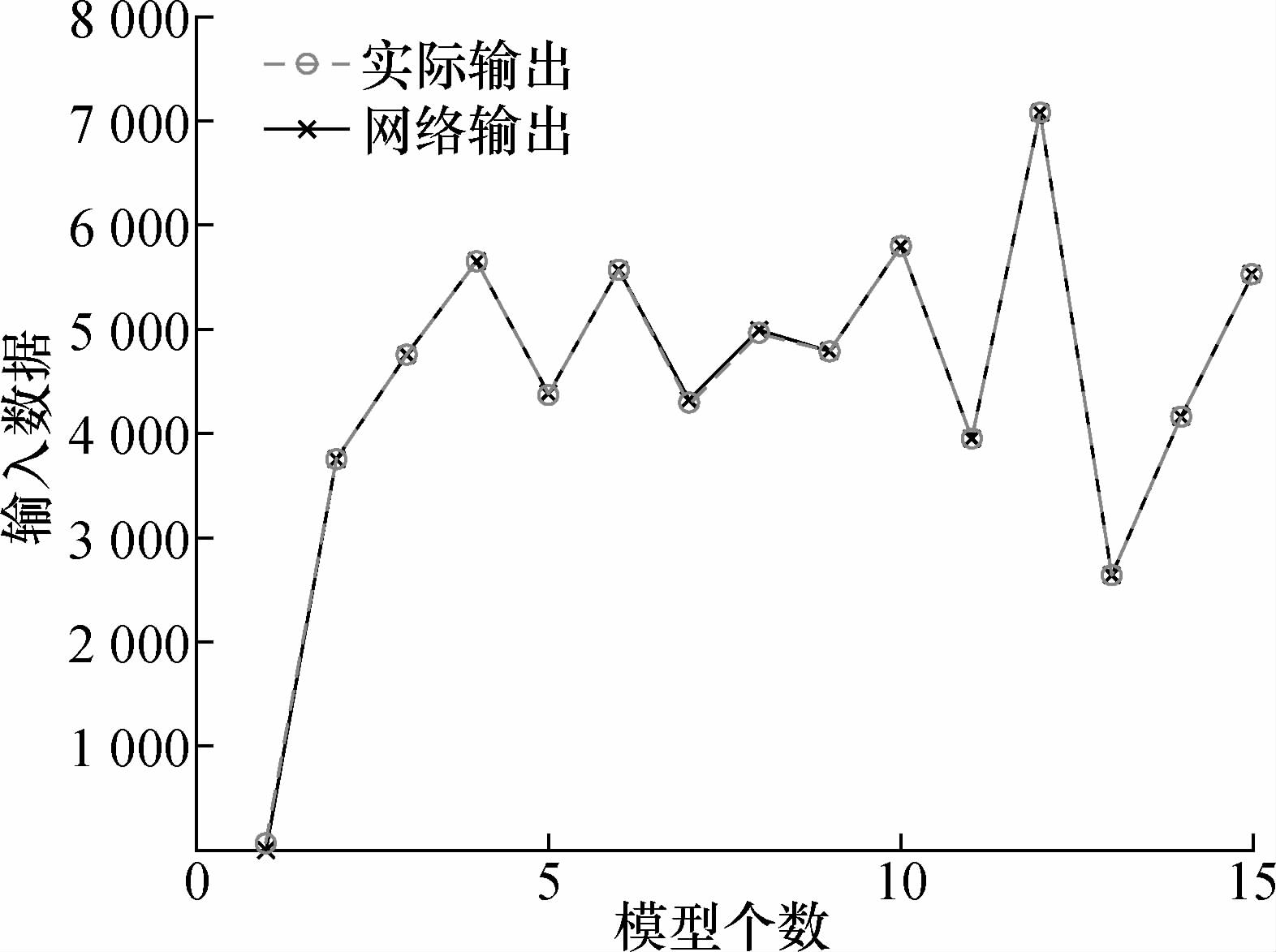
圖5網絡輸出與實際輸出對比
Fig.5Contrastbetweennetworkoutputandactualoutput
將測試組輸入模型後,測試組誤差達到1%。得到利用過程神經網絡模型對皮帶秤動態稱重誤差補償前後的結果對比。
(-1,1)區間內的隨機數,然後對FFT處理後的輸入數據和輸出數據做歸一化處理並代入網絡進行訓練。網絡K8凯发大酒店天生赢家誤差曲線如圖4所示。
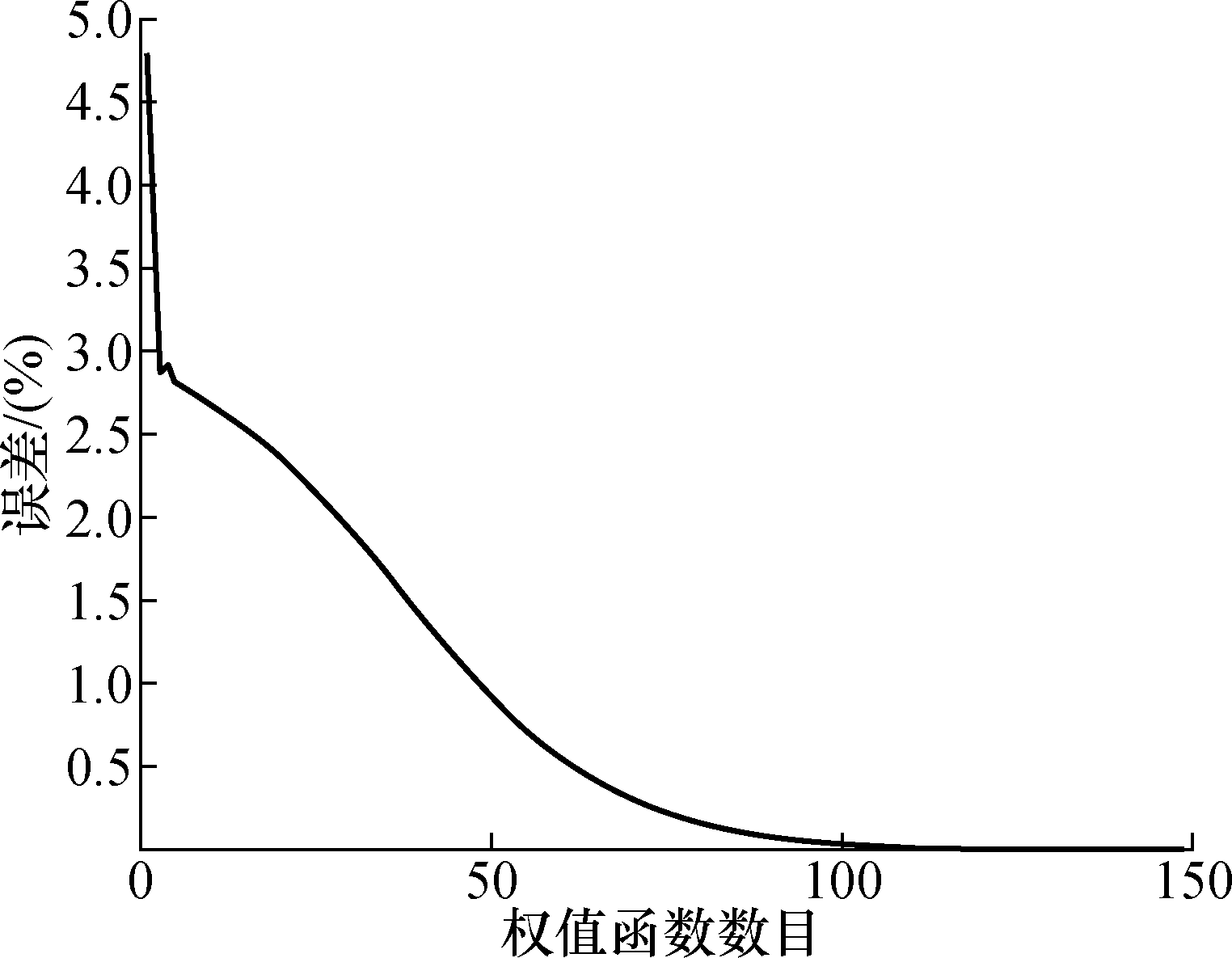
圖4K8凯发大酒店天生赢家誤差曲線圖
Fig.4Curveoflearningerror
模型經過149次K8凯发大酒店天生赢家優化達到網絡精度要求,由於采用了梯度下降法作為參數更新規則,所以前100次K8凯发大酒店天生赢家中,網絡誤差在K8凯发大酒店天生赢家初期快速下降,第1015643.05703.55656.51.070.2425791.05875.05792.21.450.0234350.04299.54305.6-1.16-1.0247069.67142.57081.61.030.17
由表1中結果可知,4組測試組中,使用網絡模型補償後新誤差均較使用網絡前的原誤差有所降低。除了第3組誤差降低不明顯外,其餘3組誤差皆降低顯著,明顯優於使用過程神經網絡算法前的誤差,說明文中所建過程神經網絡模型是可行有效的,可明顯提高皮帶秤動態稱重精度。
5結論與展望
將過程神經網絡引入皮帶秤的動態稱重精度補償研究中,算法推導正確無誤,模型擬合較好,通過測試驗證了模型的可行性和有效性。由於采用梯度下降的權值更新方法,極少情況會出現網絡K8凯发大酒店天生赢家誤差陷入局部極小值導致達不到目標訓練誤差。但由於前期訓練和測試樣本數量較少,且模型選取的基函數數量、隱含層神經元數量與模型訓練速度、收斂效果之間的經驗關係還需進一步研究摸索,故當前模型的泛化性能仍有改善空間。此外,當前研究中采用的輸入數據是數采卡直接采集,稱重段數據為人工提取,稱重信號在測量、提取過程中是否存在對稱重結果誤差的影響目前還不得而知,稱重信號是否存在失真,噪聲對稱重誤差的影響也還需要相關深入的研究。
文章來源於網絡轉載,侵刪
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器