谘詢電話
ENGLISH0755-88840386近距離無線數據傳輸稱重控製器的設計
發布時間:2020-08-26 10:35:07 |來源:網絡轉載
文中明確提出了一種根據C8051F064和CC1101的近距離無線數據傳輸稱重控製器的設計方案,將嵌入式係統和無線通訊技術性有機結合起來,釆用了二級定量分析稱重操縱,該控製器實用性強,可靠性好,擁有普遍的應用前景。
1稱重控製器的原理
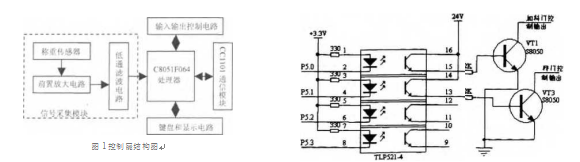
稱重控製器以C8051F064為信息內容控製部件並且以CC1101為無線通訊模塊釧,關鍵由秤重數據信號收集控製模塊、電腦鍵盤和秤重顯示信息控製模塊、輸人輸出控製回路、無線數據傳輸控製模塊等一部分構成⑶,其構造如圖所示1所顯示。當重量傳感器上裝車吊物時,重量傳感器造成與被測物件荷載正相關的工作電壓數據信號,工作電壓數據信號經放大和濾波器後,傳輸至C8051F064單片機設計內部的16位的AD轉換器變換何,進行秤重數據信號的收集,經單片機設計數據處理方法後根據顯示信息電源電路顯示信息被測物件荷載的尺寸。稱重控製器運用CC1101無線數據傳輸控製模塊,將數據信息根據無線數據傳輸的方法發送到上台電子計算機。
2硬件配置電源電路的設計方案
2.1數據信號釆集電源電路
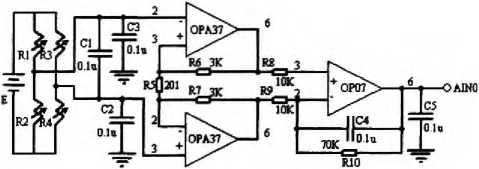
數據信號收集電源電路由重量傳感器、變大低通濾波器及C8051F064內的16位AD轉換器等構成。重量傳感器釆用電阻器應變力式感應器,完成將秤重荷載數據信號變換為很弱的工作電壓數據信號。變大低通濾波器釆用TI公司的OPA37和OP07等構成,如圖2所顯示。該電源電路將禰重感應器輸出的工作電壓數據信號開展變大和濾波器。
2.2I/O模塊
輸人輸出模塊用以完成投料門和下料門的操縱。投料門有二種投料情況:快投料、慢投料。操縱輸出控製模塊由TLP521-4光電耦合器和S8050驅動器三極管等元器件構成,用以將操縱數據信號經光電耦合器和三極管驅動器後間,對汽車繼電器和相對的投料門和下料門開展操縱。操縱鍵入控製模塊關鍵用以檢驗投料門和下料門相位傳感器鍵入數據信號的情況。先檢驗下料門感應器,如確定下料門處於關掉情況,則能夠 投料。投料時最先進到快投料,當快投料做到預訂值時,單片機設計插口P5.0輸出操縱數據信號使投料門放置慢投料運行狀態;隨後開展慢投料,慢投料完畢時,單片機設計插口P5.1輸出數據信號關掉投料門,完畢投料,而且檢驗投料門相位傳感器,如確定投料門處於關掉情況,則能夠 下料,下料完畢後進到下一個全過程。
3數據預處理
釆集到的淨重數據信息受各種各樣影響危害,務必先開展預備處理。本文選用一種滑動平均濾波器法對稱性重數據預處理。滑動平均濾波器法又被稱為遞推均值濾波器法。設W為重量傳感器k時刻的取樣值,2N+1為滑動平均濾波器對話框的長短,則k時刻過濾器的輸出數學關係式以下:
滑動平均過濾器最先收集2N+一個數據信息並各自存進2N+一個運行內存模塊;進行2N+一個秤重數據信息的第一次取樣後,之後每取樣一次,每一次取樣的新數據放進隊尾,並丟掉隊首的一次數據信息,把序列中的2N+一個數據信息求均值計算,即得到 新的濾波器數據信息輸出編碼序列。滑動平均過濾器長短2N+1由AD轉換速度和秤重結果平穩時間決策。C8051F064的AD轉換速度較大達到1Msps,本設計方案選用的取樣周期時間為4.5ms,並考慮到短期內內取樣值的平穩,經數次實驗取2N+1=15O
4軟件開發
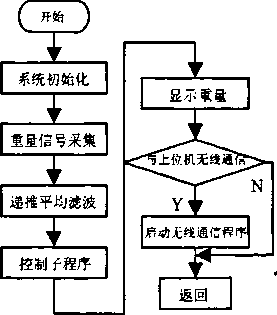
稱重控製器的源程序關鍵完成數據信號收集和解決、加下料操縱、重量顯示信息和無線數據傳輸等作用,流程表如圖所示5所顯示。
4.1數據收集
數據收集根據向ADC0操縱存儲器的AD0BUSY寫“1”起動數據交換,當査詢到ADC0操縱存儲器的AD0INT為“1”時,變換完畢,然後解決ADC數據信息。數據收集的程序流程以下:
voidGetADdata()
{charold_SFRPAGE=SFRPAGE;intidatatemp;
BYTEADH,ADL;
temp=0*
SFRPAGE=ADC0_PAGE;
AD0lNT=0;
AD0BUSY=1;
while(AD0INT==0);SystemDelay(20);ADH=ADC0H;ADL=ADC0L;temp=ADH;temp=temp«8;temp=temp+ADL;
SFRPAGE=olcLSFRPAGE;
4.2操縱匯編程序
管理程序選用的二級定量分析分成快投料總體目標量M1,慢投料總體目標量M2。當快投料淨重做到M1時,快投料全過程完畢;操縱投料門變成慢投料,進到慢投料全過程,慢投料做到M2時,慢投料全過程完畢,關掉投料門,M2=M-M3,在其中M為設定目標量,M3為提前量。從傳出關掉投料門命令到合上投料門這段時間內,投料口再次投料,會出現一個起伏量(也就是提前量),因此要提早關掉投料門,才可以保證投料更精確。操縱子流程圖如圖所示6所顯示。
4.3無線通訊控製模塊軟件開發
無線通訊程序模塊關鍵由CC1101接收和推送程序流程構成,單片機設計根據SPI接口對CC1101開展配備。當CSn為低電頻時,SPI接口開始工作,提前準備接納一條命令,CSn由高到低振蕩時開始變換命令。無線通訊流程表如圖所示7所顯示。
2) 也就能TX情況,傳數據信息到TXFIFO,假如數據信息沒有所有傳送到TXFIFO,則MCU進到功耗方式;
3) 假如傳送數據低於256時選用固定不動長的推送,不然釆用
CC1101接受方式程序編寫全過程:
1) 接受方式複位,並設定無盡接受字節數長短方式,也就能接受終斷選通接受情況;
2) 激活接受方式,假如全部字節數沒有所有被讀完RXFI-F0,則MCU將設定為功耗方式;
3) 對RXFIFO數據文件開展編解碼,讀取重力梯度送進單片機設計。5結語
該稱重控製器能即時地將精確測量數據信息根據無線數據傳輸的方法發給上台電子計算機,並能夠 根據組網方案方法完成對分散化的精確測量數據信息規範化管理,此無線網絡稱重控製器實用性強,可靠性好。
文章來源於網絡轉載,侵刪
- 上一篇:基於PLC的自動定量包裝機的電氣設計
- 下一篇: 模糊控製器在定量稱重係統中的運用
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器