谘詢電話
ENGLISH0755-88840386包裝機橫封凸輪的改進設計
發布時間:2020-08-17 10:56:42 |來源:網絡轉載
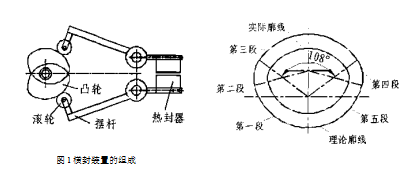
隨著人們生活水平的提高,商品包裝越來越受到人們的關注,這就促進了包裝機行業的蓬勃發展。目前,包裝機械已經成為我國的重要經濟支柱之一,廣泛的應用於各個行業。橫封機構是自動包裝機的重要組成裝置,主要完成包裝袋的橫邊熱封。在傳統的立式自動包裝機中,橫封裝置主要由擺杆、滾輪、凸輪、熱封器組成,如圖1所示。由凸輪機構的結構特性可知,凸輪輪廓的優劣決定了熱封器運動特性的好壞。不合理的凸輪輪廓不僅容易引起振動、噪聲,縮短零部件壽命,還會影響封口質量,因此設計既能滿足工作要求又具有很小衝擊的凸輪輪廓是橫封裝置設計的重點。本文以某廠立式粉末包裝機為研究對象,著重研究凸輪輪廓對包裝機振動的影響。
1原凸輪輪廓分析
1.1凸輪輪廓曲麵參數
由於橫封裝置的左右凸輪機構是對稱的,在此僅對其中一組凸輪機構進行研究。如圖2所示,原凸輪的輪廓曲線由五段圓弧拚接而成,第一段與第二段弧線構成凸輪的推程,笫三段為凸輪的遠休,第四段和第五段構成凸輪的回程。這種幾何凸輪雖然加工方便,但動力學特性較差〔七該凸輪的輪廓曲麵參數如表1所示。
1.2凸輪的運動分析
根據橫封裝置的機構組成,經幾何分析後可得岀凸輪輪廓各段圓弧對應的擺杆角位移公式。以X代表凸輪圓心與滾子圓心之間的距離,單位/mm;以S代表擺杆的角位移,單位/rad。
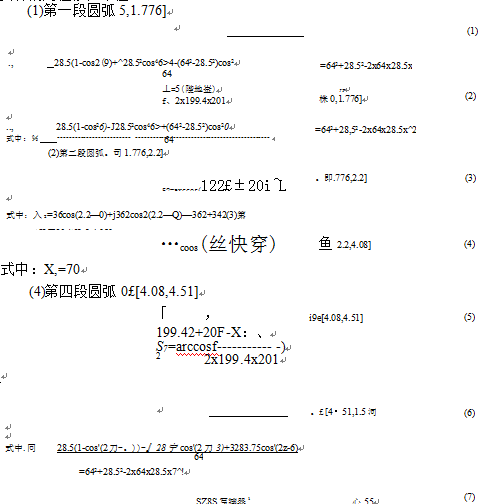
式中:X,=36cos(4.51-6»)+伽cos"(4.51-0)-36。+34,(5)第五段圓弧。式中:孑28竺3(22))+仙.5吳3部埋83.75如(23)/64押+2&寧_2x64x28.5x
1.3擺杆角位移、角速度和角加速度在MATLAB中的圖像
對式1~7求導即可得到擺杆的角速度和角加速度公式,導入MATLAB中即可繪製擺杆角位移、角速度和角加速度的圖像。MATLAB繪圖的實質也是根據步長和公式取有限的節點進行計算得岀函數值,然後用光滑的曲線連接各點坐標得出整條曲線團。由於索取點數比較多,因此所得圖像具有較高的精度,可以
滿足工作的需要。已知凸輪的轉速ty=80r/min,將O=M代入公式(7)中得到角位移、角速度、角加速度隨時間變化的圖像,如圖3、4、5所示。
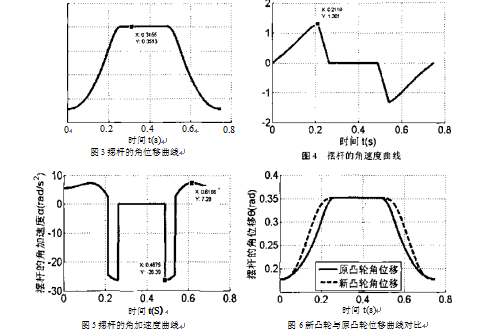





圖4中,擺杆角速度連續但無平滑過渡,存在速度的急劇變化,產生很大的衝擊。圖5中,擺杆角加速度存在突變,致使慣性力也存在突變,產生柔性衝擊,引起包裝機振動。另外,圖5中正負角加速度差值較大,回程中的加速度過大容易引起凸輪和滾輪之間的接觸力變化,產生振蕩甚至相互脫離,產生振動和噪聲。
2凸輪輪廓改進設計
2.1擺杆運動規律的選擇
在凸輪機構中,從動件常用的運動規律有多項式運動規律和三角函數運動規律以及二者的組合,根據不同的工作要求選擇不同的運動規律。熱封裝置中,凸輪轉一圈,熱封器張合一次。工作過程隻要求凸輪轉過一定角度,擺杆完成一定的行程,考慮到包裝機的包裝速度較快,應使擺杆在啟動和停止時具有較小的角速度和角加速度,減小熱封器對包裝機的衝擊,因此選用正弦運動規律。正弦運動規律的加速度變化連續平緩,在始、末點無柔性衝擊。
2.2擺杆的運動方程
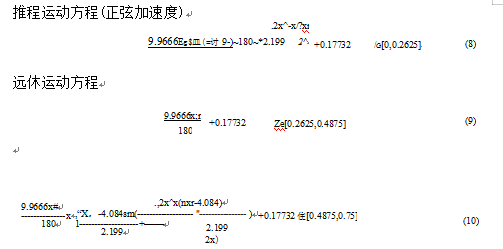
回程運動方程(正弦加速度)
上式中: n—凸輪的角速度,n=8.3776rad/s
2.3改進後的凸輪輪廓與原凸輪輪廓的比較
根據原熱封機構的運動方程和改進後的熱封機構運動方程在MATLAB中進行編程,繪製二者的圖像,直觀的顯示二者的變化趨勢及二者的區別,所得圖像如圖6、7、8所示。
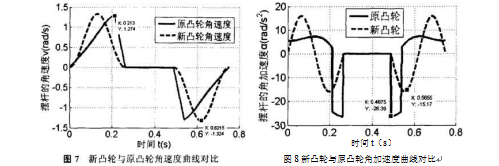


圖6、7、8中,實線代表原凸輪的特性,虛線代表改進後凸輪的特性。如圖6所示,兩條曲線的形狀基本一致,旦最大值和最小值都相同,說明改進後的凸輪能夠滿足熱封機構的工作要求。圖7中,實線呈折線形狀,說明頂機構中擺杆的角速度在折彎處變化比較劇烈。虛線不但連續而且光滑,說明新機構中擺杆的角速度變化比較平緩,產生的衝擊比較小。原熱封裝置中擺杆的最大角速度為1.301rad/s,而新熱
封裝置中擺杆的最大角速度為1.325rad/s,二者的差距很小。圖8中,原機構中擺杆的最大角加速度為26.39rad/s2,新機構中擺杆的最大角加速度為15.86rad/s2,明顯比原來小很多,而且角加速度變化光滑連續,無衝擊存在。由圖7、圖8可以明顯的看出,改'進設計後的凸輪機構具有更加優越的運動特性。
2.4改進後的熱封凸輪輪廓曲線
根據文獻,得到擺動滾子推杆盤形凸輪的輪廓方程為
 x=as\n8-Isin(5+5+^0)y=acosZ-7cos(3+s+佐)
x=as\n8-Isin(5+5+^0)y=acosZ-7cos(3+s+佐)
式中:
a一凸輪軸心與擺杆軸心之間的距離;
I—擺杆的長度;
8-凸輪轉過角度;
s—擺杆的角位移;
代一擺杆的初始擺角。
將式8、9,10代入式11中即可得到凸輪輪廓的表達式。利用MATLAB的繪圖功能,根據所得公式,分段生成新凸輪的輪廓曲線,如圖9所示。
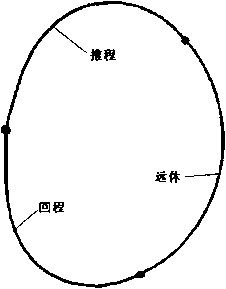
圖9改進後的凸輪輪廓
3結束語
對原有熱封機構進行結構分析,推導出凸輪輪廓曲線與擺杆轉角之間的數學關係式,運用MATLAB軟件進行仿真,直觀的反映出原有凸輪的缺陷。根據熱封裝置的工作要求,選取正弦加速度運動規律作為擺杆的運動規律,設計出了更加優越的輪廓曲線。由於采用解析法,繪製的輪廓曲線精度比較高,而且當凸輪機構的參數發生變化時,隻需修改表達式中的參數值即可得到新的輪廓曲線。
文章來源於網絡轉載,侵刪
- 上一篇:包裝機的除塵改造及其效果
- 下一篇:包裝機鋁箔紙緩衝器的風機控製裝置
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器