谘詢電話
ENGLISH0755-88840386YB517型煙草包裝機推煙包機構的設計與仿真
發布時間:2020-08-14 09:26:05 |來源:網絡轉載
0引言
隨著煙草行業對卷煙包裝機械生產速度的高速要求,煙草包裝機械已經邁入從中速(300包/min-400包/min)邁入高速(500包/min-600包/min)時代。中速的執行機構已經無法滿足高速下運動性能的要求,取而代之的是釆用更優化的運動機構。
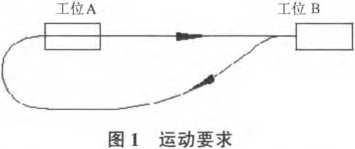
在煙包外透明紙包裝機中,包裝工藝要求推煙包器將輸送帶上的煙包從工位A推入透明紙包裝輪的模盒內,即工位B;同時要求推煙包器在從A工位到B工位的前進過程中保持水平直線運動。在回程時,由於需要避讓後方輸入的煙包,推煙器在直線回退運動的同時需要有上下擺動的運動,運動軌跡如圖1所示。在YB55A型中速包裝機中,推煙包機構采用曲柄滑塊機構和凸輪連杆機構並聯的複合機構來實現該運動要求,如圖2所示。雖然它可以實現圖1中的運動要求,但由於安裝推煙包器的滑架與支架存在著移動副,所以兩者必然具有滑動摩擦,如在高速包裝機中仍釆用原機構,在運轉速度大幅提升情況下,運動摩擦必將大大提升,這樣會造成機構元件的壽命下降,機器嘈聲提高,嚴重影響運動性能,顯然已經無法滿足高速運動要求。因此,為了滿足高速運動要求,在YB517型高速包裝機中,推煙包機構釆用曲柄搖杆機構和凸輪連杆機構並聯的複合機構,避免了滑動摩擦;同時通過對擺動凸輪機構的軌跡曲線設計,實現運動姿態要求。根據理論設計結果,進行案例設計,並進行運動仿真,檢驗該機構運動可靠性。
1機構運動要求
整個機構運動要求執行端在從工位A到工位B的過程中保持直線運動,回程為了避讓下個煙包,需按圖1所示軌跡退回。
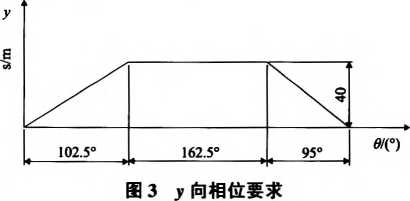
為了滿足運動要求和與其他機構的配合,推煙端在,方向的相位為102.5。段為上升段,162.5°段為靜止(推包)段,95。段為下降(避讓)段,相位圖如圖3所示。運動規律方程的選用,會影響凸輪的輪廓形狀和整個機構運動的動力學性能。由於要求該機構在高速下運行,『方向在上升段和下降段運動規律采用了4-5-6-7多項式運動規律,多項式運動規律是高速凸輪機構中廣泛使用的運動規律之一。它的通用性強,可按照任給定的若幹運動特性要
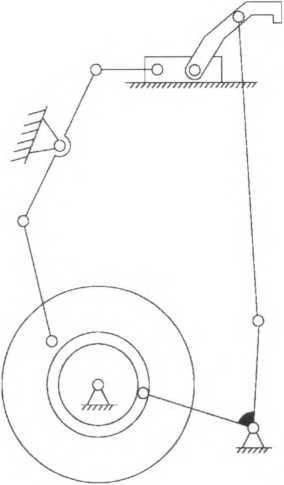
圖2傳統推煙包機構
求設計運動規律,運動特性的約束越多,多項式的項數或驀次數就越高。隻要驀次數取得足夠高,對應的高階導數總是光滑的和端點連續的。
2機構運動分析
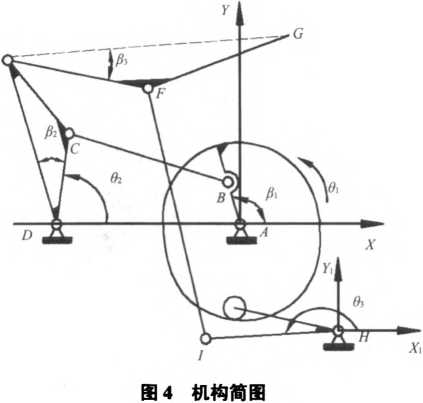
設執行端G坐標為(C,,C,),其中C,在上升段和下降段釆用4-5-6-7多項式運動規律,令G,=S(S),0,為凸輪轉角。凸輪機構驅動杆F/,四杆機構ABCDE驅動杆CDE,如圖4所示。
根據文獻[1-2]解析法計算。首先分析四杆機構ABCDE,給定杆長為IabJbcJCdJdc和如以及曲柄AB與凸輪安裝定位角,和杆CDE內夾角國,則有下式:a 丄(如sin(S+q))
\21bd+棚) +如cos(+01))
=丿如+如+2如LoCOs]S+F]) (2)
E點的坐標為:
E.=Ibecos(P2+02)-Iw (3)
Er=lDEsin(P2+e2) (4)
其次分析杆EFG,給定杆長農和&以及它們夾角用,則有下式:
C點的坐標為:
G,=J皓;-(G,-E,V+E, (5)
C,=S(S) (6)
F點的坐標為:
F,=E,+IefCOS(甲2) (7)
Fr=Er+lEFsin(
其中:
W2=arctan(%|i)-,3 (9)
下麵分析杆組F0,給定杆長上和加以及H點坐標(E,,E,),則得到凸輪的輸出規律:
CF-H^ 仆%+珞Y八 、
其中:
lFH=J(F,-■—+("/,)2 (11)
根據以上設計分析,推導出凸輪的輸出規律再根據該參數進行凸輪的設計⑴。
3機構仿真
根據表1的參數表進行設計,並借助於Pro/E軟件的建模和仿真技術*句,對推煙包機構進行運動學仿真分析。首先通過Pro/E軟件的“零件”模塊,建立零件模型;再在“組件”模塊下根據要求組裝每個零件模型,並考慮零件之間的連接關係以滿足仿真要求;最後在“機構”模塊中,調整零件間連接設置,設置電動機以及初始條件等,最終實現仿真運動。
表1設計參數表(長度單位mm;角度單位。)
如,BC^CD ^DE 如 81 Pl “c橢&3 l”1如
42162.6287.5 164 180 106.5 25 140276.2815.44 246130
對推煙包機構以550包/min的速度進行運動仿真,仿真運動軌跡結果見圖50仿真顯示執行端G的運動軌跡符合預先設計的運動軌跡要求,即符合推煙包過程的直線運動和回程的避讓運動。
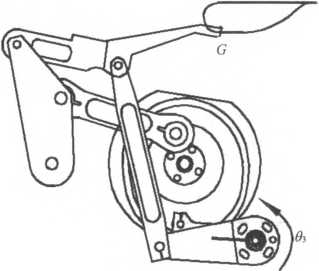
圖5仿真實例
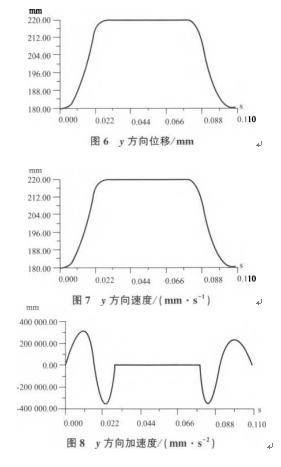
在仿真過程中,選取執行端C點作為測量對象,測量出〉方向的運動特征。執行端G點運動符合相位設計要求,並良好吻合預先設計運動規律,速度和加速度保持連續性,如圖6、圖7和圖8所示。
4結語
從理論上和仿真技術對YB517推煙包機構進行了運動學分析,建立了推煙包機構主動件和從動件的運動函數,分析了推煙包機構的運動軌跡和運動學特征。結果顯示,YB517推煙包機構能夠實現設計姿態要求,並滿足高速運動要求。
文章來源於網絡轉載,侵刪
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器