谘詢電話
ENGLISH0755-88840386C8051F350在高精度數字稱重儀表模塊中的應用
發布時間:2020-08-10 10:43:22 |來源:網絡轉載
0前言
伴隨著工業生產自動控製係統向智能化發展趨勢,近些年數顯式重量傳感器被開發設計並已獲得運用,數顯式重量傳感器可由微控製器對基本橋路開展補償和調節,開展離散係統、落後、應力鬆弛等特性的調整,進而提髙重量傳感器的特性⑴。而數據秤重模塊將數據重量傳感器置放在重量傳感器內部的A/D變換和解決電源電路在傳統式的仿真模擬重量傳感器外界完成,並能夠 設計方案係統總線插口,完成數據變送作用。既保存了數字模擬重量傳感器的綜合性性能參數,又具有總體型數據重量傳感器的全部特性和作用,另外最大限度地改進了A/D變換電源電路的辦公環境。能夠 在對原來稱重設備未作一切更改,又不拆換重量傳感器的前提條件下,根據數字式重量傳感器模塊,變仿真模擬稱重設備為數據稱重設備,是對傳統式的稱重設備開展智能化更新改造的一條捷徑。
1稱重設備基礎構造
C8051F350內部有一個全差分信號24位Sigma-Delta模/數轉化器,具備在片校正作用,並且內建了溫度感應器。其32腳位的LQFP封裝,8mmx9mmX1.6nun的規格,那樣就可以使數據接線端子(秤重模塊)的容積和淨重降到最低,並且集成化的可編程控製器増益、性能卓越A/D和溫度感應器降低了數據接線端子內部電源電路的元器件數和點焊,提升係統軟件的可靠性和準確性⑵。搭建數據秤重模塊的係統結構圖如圖所示1所顯示。
1.1提升稱重精密度的六線製信息反饋
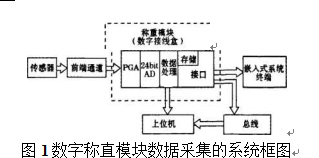
圖1數據稱直模塊數據信息釆集的係統結構圖
當感應器電橋電路轉變時,具體載入到電橋電路兩邊的工作電壓會有一定的轉變。因而,在高精密精確測量及遠距離精確測量時多選用六線製的感應器。運用C8051F350集成ic多路仿真模擬鍵入作用,對六線製的重量傳感器的鼓勵端因同軸電纜電阻器以及溫度飄移造成的輸出偏差開展賠償,提升了測量精度。如圖2所顯示,EXC*和EXC一為鼓勵工作電壓輸出,SEN*和SEW為意見反饋數據信號,1NP‘和INP-為音頻信號鍵入。MAX4618是8選2開關,將必須收集的音頻信號入選C8051F350的模擬量輸入鍵入端。能夠 待稱重采樣平穩後再開展一次SEN,和SEN-端意見反饋取樣,進而獲知電橋電路具體載入的工作電壓,隨後再對以前的釆樣結果開展數據解決。
圖2中的秤重模塊的插口適配了四線製的感應器。當聯接六線製感應器時,光耦繼電器AQW212將意見反饋端與地分隔,使意見反饋工作電壓差分信號連接調養電源電路,並根據MAX4618最後傳送到C8O51F35O的AIN0腳位。當聯接四線製時,SEN*和SEN'腳位沒有意見反饋工作電壓鍵入,這時候根據秤重方式挑選,將AQW212開啟,進而U2和U3的正相鍵入根據10kfl電阻器接地裝置。不然,若U2,U3的鍵入懸在空中,很有可能導致FO端工作電壓飽和狀態,進而造成加在多通道電源開關MAX4618的工作電壓過高,長期性應用四線製會導致集成ic的毀壞。另外因為AQW212的光耦隔離功效,維護了操縱數據信號P0.3和操縱模塊C8051F350。
1.2高特性阻抗鍵入
為提升秤重模塊的輸入電阻,進一步提高測量精度。C8051F350內部設定了兩個單獨的鍵入油壓緩衝器。每一個鍵入都是有一組(兩個)油壓緩衝器,當肯定腳位鍵入工作電壓坐落於檢測範圍的低半一部分時應用low鍵入油壓緩衝器,當肯定腳位鍵入工作電壓坐落於檢測範圍的高半一部分時應用high鍵入油壓緩衝器。進一步提高了數據信號鍵入的特性阻抗,確保了精確測量的精密度。如圖所示3所顯示,是差分信號正鍵入安全通道的油壓緩衝器構造,負安全通道和正安全通道的構造相近。
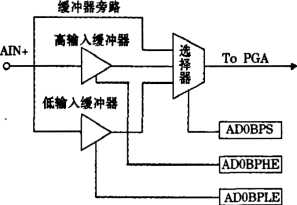
S3C8051F350正鍵入安全通道油壓緩衝器框架圖
在取樣應先試取樣一次,ADOBPHE和ADOBPLE置1使能,ADOBPS=00,應用油壓緩衝器旁通。當AIN+鍵入超出事前承諾的一個值時,ADOBPS=10,進而挑選高鍵入油壓緩衝器,隨後開始後續的釆樣工作中。一樣,AIN+鍵入低於該承諾值時,ADOBPS=01,進而挑選低鍵入油壓緩衝器。
2數據賠償
搭建高精度檢測係統除了在硬件配置上開展設計方案,還必須根據手機軟件方式開展數據賠償。
式中站為當今取樣時刻MsZ;時變指數i(A),£=0,l,2・",p,用於表明仿真模擬鍵入安全通道數據信號轉換電源電路,A/D轉化器電源電路中存有的零點漂移、溫度飄移等要素對I/O特點的危害為仿真模擬取樣鍵入,為A/D轉化器數據量輸出。一般可用階PW2。
因而針對一組鍵入可寫出以下引流矩陣,係統辨識的反向實體模型。
因為在係統辨識時,即便是規範工作電壓鍵入也存有波浪紋或者安全通道中耦合進去的一些任意影響。因而,解決規範鍵入工作電壓數次取樣,那樣鍵入工作電壓的均值才更貼近指標值,進而因而改變式⑵為匕性)理論上,當樣版充足大時,其平均值能夠 當作期待,那樣KW才更貼近規範鍵入工作電壓。若實體模型取多階,則如圖2所顯示,在MAX4618的鍵入挑選端連接1.9V和0V的標準工作電壓,在開展係統辨識的情況下各自選通並釆樣,再由式(4)求出二階反向實體模型。除此之外,因為七*)是時變指數,當采樣頻率一定時,樣版越大,耗用的時間越長,時變指數更改就很有可能越大。這時其期待和具體值中間反倒區別更大。因而,應當每一次秤重前後左右都必須1次係統辨識,且在新領域下應當做一次飄移檢測,以明確每一次秤重精確測量平穩的時間,這一時間既要確保每一次秤重抽樣的無偏性,又應考慮到係統軟件實體模型飄移的危害,以較大很有可能地確保精密度。
3手機軟件步驟
在電腦編程時,關鍵的匯編程序模塊有秤重方式設定模塊、係統軟件鑒別模塊、釆樣模塊、數據處理方法模塊、和後端開發人機交互模塊,進行一次秤重個人行為的流程圖如圖所示5所顯示。
4結語
該秤重模塊運用內置24位AD轉換器的混和數據信號單片機設計C8051F350,融合六線製感應器的特性,設計方案了適配四線製和六線製的感應器輸入通信接口。並運用反向係統軟件模型的觀念開展數據處理方法,補償係統軟件的離散係統偏差。其高精度、功耗和便於安裝拓展的特性在傳統式仿真模擬感應器的更新改造上麵有較高的實際意義。
文章來源於網絡轉載,侵刪
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器