谘詢電話
ENGLISH0755-88840386包裝機轉動臂有限元分析與優化設計
發布時間:2020-07-31 13:45:18 |來源:網絡轉載
- 引言
包裝機械目前廣泛應用於食品、日用品等行業,用於包裝固體、液體以及顆粒等[1]。目前有很多關於包裝機結構優化的研究:文獻[2]等對包裝機軸承進行了ANSYS分析,設計空心軸承避免彎曲且提高了包裝效率,利用瞬態動力學分析驗證了優化設計合理可靠;文獻[3]建立了包裝機有限元模型,模擬包裝動作得到最優折疊位置和旋轉點;文獻[4]測試了配料包裝機的動態性能並且進行ANSYS分析,獲得了配料包裝機模態參數;文獻[5]利用ANSYS對包裝機的縱封輥和橫切刀片分別進行了熱分析和力分析,給出了袋成型包裝機的設計依據;文獻[6]通過控製凸輪機構的傳動角和壓力角,實現了包裝機機械手的精確停歇。雖然針對包裝機結構優化的研究較多,但針對轉動臂結構優化分析的研究十分缺少,其設計工作基本依靠經驗完成,缺乏深入的研究,強度計算保守,因此對轉動臂進行結構優化十分必要。
Creo是某公司在Pro/Engineer係列產品的升級版新三維設計軟件,集成了CAD/CAM/CAE技術並具有強大的三維造型、分析以及優化功能,能夠在給定載荷和約束的情況下,通過迭代計算得到最優結構[7]。因此,針對使用L型封口器的自動包裝機封口機構轉動臂,采用Creo的現代設計方法進行結構優化,得到最優設計參數,使整機輕量化,為液體自動包裝機設計優化提供借鑒與參考。

- 轉動臂靜態分析
包裝機封口機構的結構簡圖,如圖1所示。工作時,凸輪3在主軸5的帶動下旋轉,驅動連杆4帶動轉動臂2往複擺動,從而實現L型熱封板1的往複開合,完成封口動作。由此可見,轉動臂2是封口機構的關鍵部件,其極限工況時的受力情況應當著重關注。為100MPa,因此轉動臂的許用應力[σ]為10MPa,許用撓度為0.04mm。因此當前轉動臂所受最大應力小於許用應力,最大變形遠低於許用撓度,模型尺寸存在改進空間。
- 轉動臂結構尺寸靈敏度分析


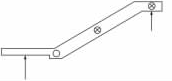
 靈敏度分析是研究當轉動臂模型的某一尺寸或參數在指定範圍內變化時,對模型所受應力、變形的影響,包括局部靈敏度分析和全局靈敏度分析[10]。將轉動臂厚度d、端部寬度d、前部寬度d設為變量進行局部靈敏度分析,如圖3所示。係統根據模型尺寸初始值大小給出局部靈敏度分析的參數變化範圍,如表1所示。
靈敏度分析是研究當轉動臂模型的某一尺寸或參數在指定範圍內變化時,對模型所受應力、變形的影響,包括局部靈敏度分析和全局靈敏度分析[10]。將轉動臂厚度d、端部寬度d、前部寬度d設為變量進行局部靈敏度分析,如圖3所示。係統根據模型尺寸初始值大小給出局部靈敏度分析的參數變化範圍,如表1所示。
-
- 參數設置


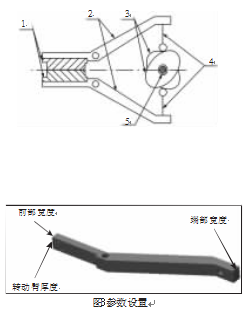
圖1封口機構
Fig.1SealingMechanism
根據轉動臂的結構特征,簡化不影響優化結果的倒角和倒圓,利用CreoParametric創建轉動臂三維模型。
-
-
- 材料定義
-
轉動臂材料為灰鑄鐵HT100-3,在Creo/Mechanica材料庫中選擇與其性能相當的牌號為FENODR的材料,定義轉動臂模型材料屬性。
-
-
- 約束定義
-
轉動臂y方向上5個螺紋孔用於連接和固定,不發生相對移動或轉動,設定為全部約束。轉動臂z方向的螺紋孔用於安裝旋轉軸,以實現往複擺動,故設定為繞軸轉動自由[8]。
-
-
- 載荷定義
-
轉動臂工作時的受力分析,如圖2所示。所受的載荷主要有以下幾種:(1)前部載荷:轉動臂前部側麵與L型熱封板連接,承受載荷主要來自熱封時的反作用力,經計算約157.73N,故轉動臂所受側麵載荷F1為158N。(2)尾部載荷:轉動臂尾部側麵與端部連接塊連接,用以傳遞凸輪的作用力。由於分析的是上轉動臂,故該載荷在y-z平麵,y方向為462.87N,z方向為260.52N,近似取F2為463N、F3為261N。
(3)自身重力:轉動臂重力載荷G。
Fig.3ParametersSetting
表1局部靈敏度分析參數
Tab.1LocalSensitivityAnalysisParameter

分析參數/mm 初始值 最小值 最大值
d1 40.0 39.6 40.4
d2 30.0 29.7 30.3
d3 20.0 19.8 20.2
3.1局部靈敏度分析
使用分析菜單下“敏感度分析研究”工具,“研究類型”選擇“局部靈敏度”,分析基礎選擇前述的靜態分析,即“Analysis1
(Static)”,添加設計變量,開始運行。
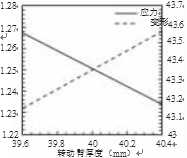
得到三個設計參數的局部靈敏度分析曲線,如圖4所示。從圖4(a)、圖4(b)可看出,應力、變形的變化曲線斜率均>0,而圖4(c)中應力、變形均不隨參數變化而變化,說明應力和變形對於厚度d1、端部寬度d2的變化較為敏感,而對前部寬度d3的變化敏感度為0。因此選取轉動臂厚度、端部寬度作為設計參數進行全局靈敏度分析。
2.2分析計算
在CreoSimulation模塊下建立靜態分析“Analysis1(Static)”,將之前所定義的約束與載荷自動匹配到對話框中的載荷與約束集欄內,收斂方式為“單通道自適應性”,設定繪製柵格為4,點擊“運行”,同時在“顯示研究狀態”中查看當前分析研究日誌,查看有限元分析結果可知臂運動到極限位置時最大應力為1.25MPa,最大變形是4.335×10-5mm。=根據轉動臂材料查閱國家標準GB/T9439-2010[9]可知,灰鑄鐵的抗拉強度安全係數至少為10,伸長率至少為0.2%,強度極限 =4.1建立優化設計模型
=4.1建立優化設計模型
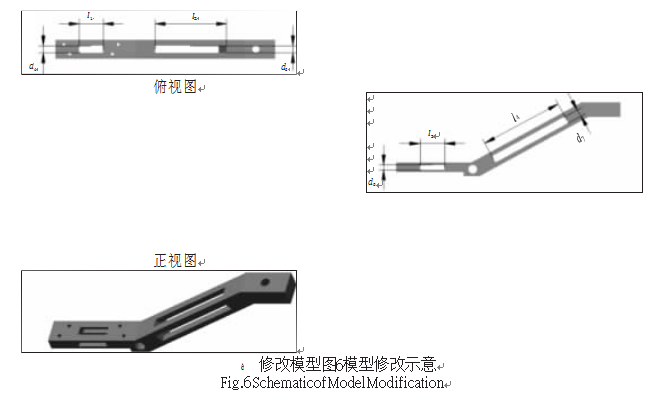
由靜態分析可知,轉動臂中間部分以及前端部分對所受應力的影響最小,因此在這兩個部分開設凹槽進行結構優化。俯視圖方向分別做長l1=50mm、寬d4=15mm和長l2=170mm、寬d5=15mm的凹槽,如圖6(a)所示。正視圖方向分別做長l3=50mm、寬d6=10mm和長l4=170mm、寬d7=15mm的凹槽,如圖6(b)所示。修改後的模型,如圖6(c)所示。
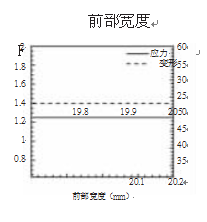
圖4局部靈敏度分析曲線
Fig.4LocalSensitivityAnalysisCurve
-
- 全局靈敏度分析
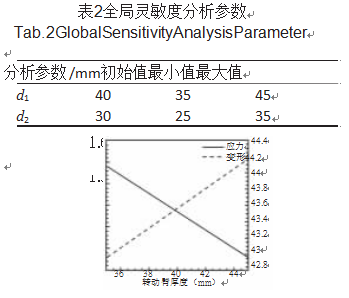
根據端部連接塊和L型封口器尺寸可知轉動臂厚度d1應在
(35~45)mm之間;根據封口機構的安裝尺寸可知端部寬度d2應限製在(25~35)mm之間,因此設計參數d1和d2的全部變化範圍,如表2所示。使用分析菜單下“敏感度分析研究”工具“,研究類型”選擇“全局靈敏度”,分析基礎仍然是“Analysis1(Static)”,選定d1、d2為變量,確定運行.得出全局靈敏度分析曲線,如圖5所示。結果表明,隨著d1、d2增加,轉動臂應力和變形均呈下降趨勢,變量在全部取值範圍內對模型存在影響,因此以這兩個參數為約
束條件之一進行優化設計。
由轉動臂連接件的尺寸確定d1、d2的變化範圍,進而確定參
數d4、d5、d6、d7的變化範圍,而凹槽長度l1、l2受轉動臂中間部分固有尺寸的限製,凹槽長度l、l受到轉動臂前端部分螺栓位置的限
- 結論
針對轉動臂設計不規範導致的自重過大、浪費材料等問題,采用Creo建模並進行分析優化,得出結論:
-
- 結構優化前轉動臂在實際工況下的靜態分析結果表明,其最大應力及最大變形都遠小於許用值,存在改進空間。
- 通過對轉動臂進行局部靈敏度分析可以看出轉動臂厚度對模型的影響最大,其次是端部寬度.而前部寬度對模型應力、變形大小不影響。
- 通過全局靈敏度分析可以看出端部寬度、轉動臂厚度的增大會使轉動臂所受應力減小、變形減小、轉動臂總質量增加。
- 采用二次優化規劃算法對轉動臂進行結構優化,滿足剛強度的前提下獲得了轉動臂的最優設計尺寸,並且優化後轉動臂的總質量減輕了66.7%,實現了機構輕量化。
文章來源於網絡轉載,侵刪
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器