谘詢電話
ENGLISH0755-88840386包裝機用轉位凸輪的設計
發布時間:2020-07-21 14:48:53 |來源:網絡轉載
包裝機械運動的形式是多種多樣的。其 中有許多機構,要作連續運動,如連續的轉 動或移動,連續的往複擺動和往複移動。這 些運動形式可用齒輪機構,連杆機構和凸輪 機梅等實現。還有一些機構要作繼續運動, 如轉位凸輪機構,馬爾他機構,轉輪機構, 久齒齒輪機構等等。
馬爾他機鞫即槽輪機構,它從停到動和 從動到停的瞬時,角加速度都有一個突然的 變化。因此,槽輪同其傳動軸上的慣性負荷 都有一個突然的變化。這種變化實質上就是 一次衝擊和振動。而蘇輪機構雖然結構比較 簡單.,但是由於結構上的限製,其動作準確 度較差。另外,在高速使用時有衝擊和噪音。 欠齒齒輪機構,其動力特性則有舸顯的欠 缺。因此,現代包裝機的間歐運動機構,大 多釆用轉位凸輪機構。它比起上述間歇運動 機構有其得天獨厚的憂點:
(1)裝配方便,運動平穩可靠I
<2>可以獲得轉位與停位的任何時間比 例
規律。 -
轉位凸輪按其運動形式可分為連續旋轉
和斷續旋轉兩種。
連續旋轉的轉位凸輪結構簡單,工作可 靠,一般都是等速旋轉°它的轉位角B和空 程轉角a之比,就是轉位時間與靜止時間之 比,而靜止時間正是包裝機用來完成產品的 包裝工藝時間,因此轉位角B一般在60—120 範圍內。對於斷續旋轉的轉位凸輪,按時接 通旋轉和停止,都必須有專門的發令件和離 令器加以控製,顯然結鞫就比較複雜。由於 其轉位角B不直接影響包裝機的效率,故一 般選擇在240以下。在什麽情況下采用連 續旋轉的轉位凸輪,在什麽情況下釆用斷續 旋轉的轉位凸輪,需要在轉位凸輪的直徑計 算之後來確定。一般在凸輪直後不太大的情 況下應釆用連續旋轉的轉位凸輪。
轉位凸輪的曲線槽有兩種。一種是矩形 槽,它的優點是製造簡單,成本低.另一種 是梯形槽,其優點是:(1)能使滾子在梯形 曲線槽中與工作麵接觸的各點線速度相同, 從而減少磨損,(2)工作麵在運轉中逐漸磨 損後,可以降低滾子盤與轉位凸輪之間的距 離,使滾子與工作麵重新剤配,修複方便。
梯形槽的夾角2 a是按滾子與曲線槽在 接觸錢上無滑動來確定的。若某一轉位凸輪 半徑R = 134 mm,半徑處槽寬為35 mm,則 tg a = a = 7°26' 2a=14°52'
夾角2 a的頂點必須在凸輪的軸線上,通 常2 a在17°左右(見圖1 )
Pg—在傳動中產生的最大力(蛇)
a.”一從動作的最大加速度
因此從上式可以看出,在整個係統設計 後,在傳動中產生的最大力Pg和從動件係 統的質量是一個常數,而隻有加速度的變化, 才是導致衝擊載荷增大和產生振動的主要因 素。 -'
餘弦運動規律(即簡諧運動曲線〉在分度 轉位機構中的應用:首先,分析一下轉位凸 輪轉位曲線的運動規律。它對傳動機構的結 構和工作性能有很大的影響,國此,必須根 據對傳動機構提出的要求來選擇恰當的運動 規律。
傳動機構的要求是:
<1)在可能允許的最短時間內,轉動應 平穩,無衝擊和振動
<2)傳動機構的零件應具有較高的耐磨 性;
<3)停位和定位應具有較高的精度。
為了滿足第一個要求,必須保證在運動 過程中不產生剛性和柔性衝擊,即不應產生 由於運動加速度的變化而引起慣性力的大小 和方向的瞬時改變。由於餘弦運動規律設計 簡單,易於理解,性能良好等特點,轉位凸輪 轉位曲線一般釆用餘弦加速度由線。餘弦加 速度規律雖然在運動的始末,加速度發生有 限的突變,會產生柔性衝擊.但在中點處加 速度為零,不產生衝擊,且在整個行程中餘 弦加速度的變化是圓滑的(見圖2 Jo
加速度的變化將引起衝擊載荷的顯著增為了滿足第二個要求,即零件的高度耐 磨性,這個問題不僅要選用硬度和耐磨性好 的材料,同時應減小工作中產生的負荷。
產生負荷的原因有,
<1)阻力(磨擦,行程控製警等、
<2)慣性作用力,
<3)衝擊負荷,
E)壓力角。
在設計現代包裝機用轉位凸輪時,阻力 一般不可能減少。當選用餘弦運動規律時, 一般不會產生衝擊。因此,在設計時,主要 隊慣性力和壓力角來考慮,•從而改進工作性 能和提高其使用壽命。
慣性力由從動件的加速度決定:
Pwh = m・a
式中t PwH—慣性力(kg)
m—從動係統的質量(kg-s2/m) a —從動件的加速度(m/s2)
轉位凸輪不但給滾子傳遞運動,而且也 傳遞力。從傳力的視點看,希望壓力角越小 越好,但壓力角越小,則凸輪的尺寸越大。 通常轉位凸輪的壓力角限製在30°〜40°範圏 內。既然壓力角有限製315麽在轉位凸輪輪廓 設計完後,就需要檢驗一下輪廓上的最大壓 力角是否超過規定範圍。如果超過較多,就 需要加大等基圓半徑重新設計輪廓,如果壓 力角很小,說明設計的輪廓傳力比較輕快3 但如果凸輪尺寸較大,就需驀減小基圓半徑 修改設計,這些都要根據設計中的具悻情況 來決定。
轉位凸輪直徑的計算,
D = q—-
q t.tg Qm„
式中,D—凸輪直徑
T—包裝機工作周期<s )
H—轉位盤移動的位向距離《mm) 氐一轉位時間(s )
。皿一最大允許壓力角
q—運動規律係數《餘弦運動規律q = 0.5)
由於轉位凸輪和滾子之間理論上是線接 觸,應力較大,故要求表麵硬度高、耐磨, 具有足夠的表麵接觸強度。因此,轉最凸輪 的選材,一般說來,對於壓力角較小的釆用 球墨鑄鐵QT60- 2或釆用優質灰鑄鐵HT 20-40, HT 25-47等材料扌壓力角較大的常 用20Cr滲碳淬火(滲碳深度
HRC56~62)或用45, 40Cr, GCr 15表麵淬 火HRC40—50,表麵高頻淬火HRC52-58d 為了滿足第三個要求,在設計時,柱銷 一般要選用窄係列的滾動軸承。為提高傳動 精度,軸承在裝配時應采用預緊方法,以消 除其徑向遊隙。在裝配轉位凸輪和滾子轉盤 時,可以利用控製中心距的辦法,使滾子表 麵和轉位凸輪輪廓間造成預緊。
轉位凸輪的運動規律亦和其它凸輪機構 一樣,有許多類型。現對餘弦加速度曲線(即
|
附表 |
|
|
|
運動規律 |
金弦前速度(簡諧) |
正弦如連度(援線) |
|
諼度廃律特點 |
在行程始末為零.中點處最大 |
在行程始末為筮,中點處最大 |
|
最大速度的比值(以辱速規律為 1) |
1.57 |
2 |
|
加建崖規律符點(見圖2) |
在行程始末較大,中點姓為零,在整個行 程中照滑變化 |
在行程始末及中糸均為零,拄整個行程中 圓清變化 ■ |
|
鼠大加速度的比值〈以等加-萼 滅速為1 ) |
1,24 |
1.57 |
|
主嗖性能特點 |
在行程始末加速度發生有限值的突變,會 產生柔性畔擊“但在中點姓加速度為害, 不產生衝擊,且整個行程中加速度變化是 圓檎的 j中速時應用效果最好 |
琛音,磨損較小,理論上無衝擊.但性能 ・ 取決於製造精度e在行程開始和賤了時的 製造公差非常重要,要求貌將良好性能的 公差為土 D. OOBm m 能用於高速 |
簡諧運動強線)與正弦加速度弦曲線(即擺線 曲線)運動規律(見附表)。
硯舉例說明轉位凸輪輪廓尺寸的設計: 如某廠要設計一燈泡包裝機,其生產能 力為1200隻/ h ,設計生產能力為Q = 1250隻 /ho
4.1 要求每隻燈泡的工作時間t總
臨=盜=2.883)
4.2求出工作轉盤的轉位時間壇 壇=罕=0.723)(選用轉位
4
凸輪的轉位角為90°時)
停位時間tn = 2.16s
4.3求出轉位凸輪每轉一轉時工作轉盤 的轉角七
丫 =響=3°°(選用工作轉盤為12
工位時)
4.4求轉位凸輪推動工作轉盤的最大距 離H
設工作轉盤直徑為© = 200 mm(見圖3 )
R =100為工作轉盤的半徑,丫 =30為轉 角,A, B分別為轉盤上相鄰兩滾孑。
H = AB = AD+DB
因為:AD=DB = Rsin}
£
所以:H = 2Rsin; = 51.7638(mni)
JU
s 用公式計算轉位凸軸軸曲鰻在座標係 統中的Uh
5.1 h = H(1 - cos a)/2
式中:H曲線總行程
h對應於單位轉角a的曲線升程 a單位轉角
hl = h(l - cos a 1)/2
h2= H(l-COSa2)/2
S.2根據h = H(l -cosa)/2公式計算轉位 凸輪輪廓曲線在座標中的值h 當 al =0° 時,hl= H(1 -COS0-)/2 = 0
«2 = 30° 時,h2 = H(l-cos30°)/2
=3* 4682
ct3=60° 時,h3= H(l-cos 60°)/2
= 12.941
■ ,
a4 = 90° 時,h4 = H(1-cos90°)/2
= 25.8819
□ 5 = 120°時,h5 = H(l-cosl20°)/2
=38.8229
a 6 = 150°時,h6 = H(l-cos 150°)/2
= 48.2963
a 7 = 180°時,h7=H(l-cosl80°)/2
= 51.7638
6 轉盤凸輪花専曲錐的修正(見圖4)
由於滾子在斜線槽中的運動軌跡並非走 弦線長,而實際上是走弧線長。因此,為了 保證轉位時的平穩,必須對曲線進行修正°
6.1求P點的修正值X
P點的 Y值:Y = rcosa
P點的X值,如為R2=(R-X)iY
.所以(R-X)JR2—丫£
(下轉第人頁>
線在X0Z坐標平麵上的投影近似於圓,其最 大誤差僅為0.216 mm,足以滿足實際生產中 的焊接需要。因此,在這種條件下可以用焊 接件的圓周運動和焊槍頭的直線運動即可近 似地合成所需要的空間焊縫曲銭,而不必使 焊槍頭作三維空間運動進行焊接。這種替代 大大地簡化了這種焊接機的結構,可作為誤 類自動焊接機設計的理論依據。
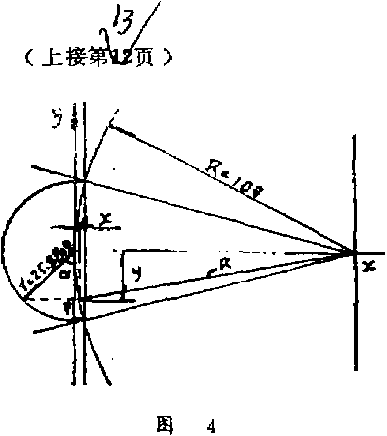 |
X= R-"電- Geos ex戸
6.2根據修正值公式
X = R - "R? -〈丫 cos 尋 求輪廓曲線在座標係統中的X值
當 a 1= 0。時,XI = 3.4074
■ 2 = 30°時,X2 = 2.5442
欠7 = 18。°時,X7 = 3.4074
輪廓曲線的修正,就是為了保證在加工 轉位凸輪輪指的轉位部分時,使刀具的軸推 確地與組裝後的療子軸線相重合,也就是使 刀具切於轉位凸輪外圓母線上,且過座標始 點的平麵內有一個附加位移,從而使滾子在 斜線槽中的運動軌跡為~個孤線。
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:包裝機電氣控製的抗幹擾問題
- 下一篇:包裝機中塑料卷所受牽引力的研究
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器