谘詢電話
ENGLISH0755-88840386氣動包裝機執行機構精確定位的單片機控製
發布時間:2020-07-09 11:12:46 |來源:網絡轉載
氣動係統因其結構簡單、價格低廉、以空氣為介質,不汙染環境等特點.特別適合用於食品包裝、藥品包裝等包裝機上,在其它包裝機上的應用也越來越廣泛,但空氣介質的壓縮性大、粘 度小等特點,使包裝機的定位操作難以達到要求,而隨著包裝工業的發展,定位精度要求越來 越高,國外一些先進的包裝機廠家,如美國蘭斯頓等公司生產的瓦愣板生產線的橫切機切紙精 度為士0.5 mm。因此迫切需要尋求一種廉價的、反應快又位置準確的氣動控製係統.適應包裝 機的現代化要求•本文主要介紹了 PCM控製原理、氣動係統回路、實驗裝置以及単片機係統 的硬件係統。
1 PCM控製原理
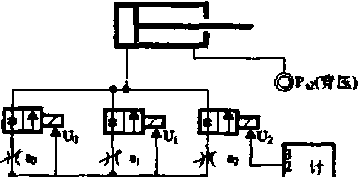 |
由圖1可見,其控製回路由開關閥u°〜 U?組成PCM控製閥組,依靠控製3個開關閥的 開關組合來控製施量。節流閥開口麵積鳳、代、 “2為a“ > az : % = 1 * 2=4.當三個閥按不同組 含開啟時.可得到8種不同K8凯发登录入口.單片機根據控 製量的設定值和檢測的控製實時值相比較.依 據設定的控製規律,計算發出一組二進製編碼 控製PCM閥組的開啟,得到不同的綜合開口麵 積,從而改變了控製閥的K8凯发登录入口,使氣缸能準確地 運動至目標位置。
PCM控製可采用升關時間較長的低性能閥,這樣就為采用普通的通用閥進行位移控製幵 辟了一條途徑.近年來•隨著氣動技術的發展,電磁換向閥在小型和低耗方麵也取得了進展•為 PCM控製係統的發展提供了條件.
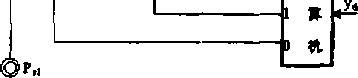
實驗裝置如圖2所示.
 |
氣缸1(行程200 mm)的活塞推動慣性負載2,活塞的位移由線性光柵位移傳感器3(測量 範圍。〜30。mm,精度工0, 01 mm)檢測,經A/D轉換器6(# 1/2)位精度)變為數字信號送入 單片機7.計算機根據指令位移信號頭和實際位移信號),進行判斷和運算,發岀輸岀信號.經 輸出接口板及功率放大器.控製U。〜U,的開閉。其中U“、Uj、U』、U3構成PCM閥組.閥的節流 口有效麵積成等比級數,即控製開關閥出口節流的K8凯发登录入口成等比級數關係.調節閥的節流K8凯发登录入口
、“2、“3 分別為 0. 079 m'/h、。, 158 m'/h、。, 316 m*/h、O. 632 nrVh。對應於 0000 至 1111 共 16個二進製控製碼,可以組合成16級K8凯发登录入口及活塞速度。控製碼c由單片機按照比例控製的原 則給出“的形成公
在實驗中5取為4,為取為0. 1 mm*閥或、項作為換間閥用.氣動係統采用岀口節流方 式,經排氣節流後通往大氣,運動平穩、可靠。
31硬件係統
控製係統原理圖見圖3所示。
EMLOM RAM
|
' '1 |
, on on x |
|||
|
|
地虹 |
&紋 |
> |
|
|
0031 |
、7T |
1 |
/\ |
/\ Z |
|
|
1 1 |
V |
|
X |
|
|
|
ft « |
|
-X |
|
CPU |
、nil |
U 0 |
U。' |
|
|
— |
|
|
示段口 |
檢劉反憤接口 |
|
|
u |
|
|
fr |
|
|
|
|
|
位形傳雄* |
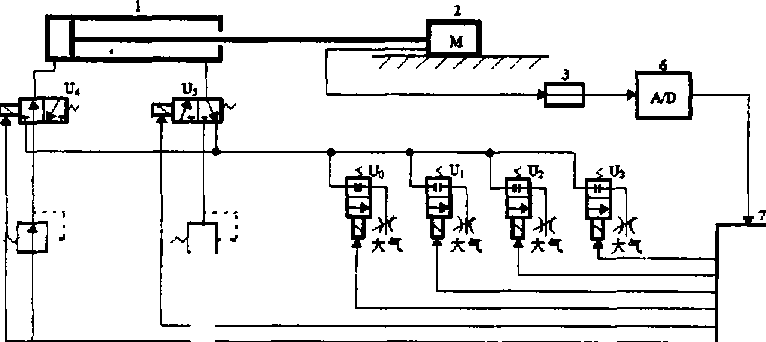
圖3單片機控製係統原理圖
本係統由五部分組成:存儲嚴部分,鍵盤顯示部分;反饋檢測部分;功率驅動部分;控製核 心采用MCS-51係列單片機,8031芯片作控製嚴CPU (Central Processing Unit中心處理單 元)。
就反饋校測部分和功率驅動部分作簡要介紹。反饋檢測由傳感器和相應接口器件組成,是 被測對象輸入通道,使單片機能拾取氣缸位移信息,功率驅動部分是單片機的輸出通道,完成 控製開關閥的功能,反饋檢測部分和功率驅動部分構成了單片機的輸入輸出通道,反饋檢測電 路和功率驅動電路原理圖見圖4.
反饋檢測部分:由位移傳感器測得其位移,經A/D轉換把模擬堂轉換為數字量.由8255 並行接口片輸入到單片機,單片機接收采集數據進行數據處理。
功率驅動部分:單片機經8255並行接口芯片輸出二進製碼,經過光電隔離TLP521-4和 固態繼電器SSR,最後輸出控製開關閥。
3.2軟件係統
本控製係統軟件設計采用模塊設計技術,程序模塊分成主程序模塊、鍵盤顯示程序模塊和 控製程序模埃。
主程序模塊主要起係統初始化作用•根據源程序設計思想和相應硬件對其進行初始化處 理,軟件係統設計了兩個中斷處理程序:鍵盤顯示程序,控製程序•鍵盤顯示程序設置係統入機 接口協議、控製參數輸久、鍵定義.其作用是人機互換、完成始定信號輸入、正確處理•以便於進 行輸入信號的產生和檢測控製•鍵盤顯示程序還必須有鍵輸入容錯處理•來克服操作過程中所 出現的誤操作。
控製程序模塊包括PCM控製子程序,PID ^Proportional—Integral ^Differential 比例積分微分)算法.由實驗 知,仗用偏差位移信號進行簡單的比例反饋揑製.係統性能 指標不很理想.為了使係統性能得到改善,加入校正網絡, 即通過單片機控製運算實現其要求的控製規律,單片機起 控製器的作用,這就是數字控製。PID調節是連續係統中技 術成熟,應用廣泛的一種控製方法,經過長期工程實踐總 結,形成了一套PID控製方法,不但有典型結構,且參數整 齊方便、結構改變靈活.尤其在控製對象的動態特性還未完 全掌握情況下,此控製方法更為有效,空氣壓縮性大,使氣 動係統難以得到精確模型.因此適用采用PID控製算法. 使係統的揑製,屋能得到明顯改善。控製程序框圖見圖民
抗幹擾是單片機係統必不可少的重要環節,往往安裝 和調試好的樣機投入現場進行實驗運行時,幾乎都不能正 常工作,這都是幹擾的影響。幹擾作用在單片機係統的輸入 係統、輸出係統、單片機內核CPU,從而引發一係列嚴重的 後果。軟件抗幹擾設計可以彌補硬件未考慮的抗幹擾電路 設計,無需硬件代價,不失為一些有效措施.
數字濾波算法是采樣多次數據結果,從數據係列中提 取逼近真值數據的軟件算法.剔除幹擾值,它能完我硬件抗幹擾功效.由於軟件算法的靈活性. 應盡量釆用單字節指令.並且關鍵地方人為插入一些單字節空指令•或將有效單字節指令重複 書寫,將幹擾後的程序納入正軌,起到抗幹擾作用。.
通過對單片機PCM控製進行的大量實驗研究,得岀以下的結論:
D可以用響應較慢的開關閥得到較高的動態響應指標.大大降低了成本,提高了可靠性。
2)選擇合適的P1D控製參數,PID算法在氣動位置PCM控製中可得到較為理想的控製 ,性能指標,也可得到較高的位移重夏精度,一般能達到0.5 mm,國外報道的PCM,控製精度達 到 ±0. 08 mm。
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:冷飲包裝機光電跟蹤原理及其調試
- 下一篇:日本——包裝機械最大的生產國
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器