谘詢電話
ENGLISH0755-88840386齒輪連杆機構在雪糕包裝機中的應用
發布時間:2020-07-09 09:59:32 |來源:網絡轉載
1引言
在包裝機械中,許多包裝工藝過程需要冋歇運動來完成,如包裝材料、產品及包裝的輸送,翻 轉或轉移,工作台的間歇轉位等。我們設計的BX200 I雪糕包裝機的間歇輸送鏈道就是應用齒輪連杆機構即三輪四杆機構來完成的。
輸送鏈道1將雪糕2送至推板3處時,由推板垂直撥入包裝材料4中.熱封包裝。推板要把雪糕從鏈道上推入正在成型的包裝 材料中,就需要鏈道在推板處把雪糕從鏈道推出 的這段時間內停止迅動。即要求輸出鏈道做冋歇 運動。
實現間歇運動的機構有槽輪機構、棘轉機構、 凸輪機構及三輪四杆機構等。但由於槽輪機構、棘 輪機構的結構、運動和動力特性的限製,它們的運 轉速度不能很高,每分鍾的間歇次數不能超過 1。0〜200次。否則,動載荷很大,衝擊和振動很強
輕工心1998年 烈,可靠性很差,機構的工作準確度就難以保證。 而凸輪式間歇機構加工比較複雜,而且高速運轉 的凸輪加工精度要求很高,裝配調整要求也高。而 齒輪連杆機構加工方便、在高速運轉中精度易於 保證,運轉可靠。我們設計的雪糕包裝機,速度達 200包/分,在連續運轉中有瞬間的暫停,即暫停 時間比較短。因此采用齒輪連杆機構,也就是三輪 四杆機構來完成它的間歇運動。
它是由3個相互齧合 的齒輪1、3、5和一個曲柄揺杆機構ABCD組成 的複合機構。連杆2連接齒輪1、3的中心,連接齒 輪3、5的是插杆4。齒輪1偏心固聯在偏心軸塊6上,以鍵聯結。 齒輪3自由地回轉在連杆2上與搖杆4的連接軸 上。當齒輪1繞偏心軸6作勻速轉動時,一方麵通 過齧合使齒輪3轉動,另一方麵因為它是偏心安 裝的,又通過連杆2使揺杆4擺動,所以齒輪5輸 出的運動是兩個運動的複合,是按一定規律變化 的有間歇的運動•這樣就滿足了輸送鏈道間歇運 動的要求。
3機構的運動分析
設曲 柄搖杆機構中的曲柄AB = a.連杆BC = b,搖杆 CD=c,機架AD=d,齒輪1,3,5的節圓半徑分別 為 rl式中:%、》、% 分別為齒輪5及杆2、杆4的角 加速度。隻有在3s =。時,機構處於暫停狀態,因 此,這種機構在起停瞬時角速度和角加速度都為 零,衝擊、振動小
為了簡化公式推導,假定r:=r,,則有:b=c=ri+r2
根據三心定理,齒輪5和齒輪1的相對速度 瞬心Pis位於瞬心線Pm、P°s的延長線的交點上, 則螺根據三角形的正、餘弦定理求得:OA搖杆CD上分別裝有齒輪3和5組成一個周
0)1 max a】 min
則齒輪5與作正轉一停歇一反轉一停歇的周期運 動,如圖5的曲線C所示。
從上邊b=c的條件下分析可知,在一定的條 件下,三輪四杆機構能夠實現瞬時的間歇運動即 曲線B所示。在理論上齒輪5隻是在270。的瞬間 停,但在實際機構中,在通常的製造偏差範圍內, 間歇時間約等於齒輪1轉過45。角的時間,即相當 於1/8周期。
4輸出有一次暫時停頓的三輪四杆機構的設針
輸出有暫時停頓也就是如圖5的曲線B所 示,齒輪5有瞬時的停歇,也就是說此種機構在偏 心軸以姫的勻角速度旋轉時,齒輪5在某一瞬時 有&=0
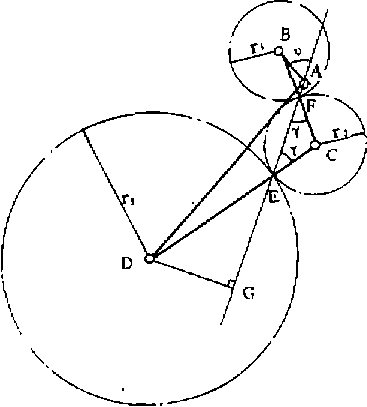
圖5
圖5所示為機構處於暫停的位置。在這個位 置不論齒輪1的角速度也為多大,而齒輪5的角 速度為零。條件是1、3齒輪的齧合點F,3、5齒輪 的齧合點E和輸入軸A三點在一條直線上•
同為F點是齒輪1、3的相對運動瞬時中心 P“,E點是齒輪3、5的相對運動瞬時中心P35>A 點為齒輪1的絕對瞬時中心Poi.D點為齒輪5的 絕對瞬心P°s,所以當AEF共線時,A點就是齒輪 1和齒輪5的相對運動瞬時中心Pis的位置。
根據瞬時中心的定義,兩個運動著的構件上 與相對瞬時中心位置一致的點的絕對速度相等, 而相對運動速度為零°所以齒輪5上位於A處的 點的速度應和齒輪1上的A點速度相等,而齒輪 1上的A點速度為零,即有齒輪5此時不動,速度 為零。
從作圖可看出,在AD較大的情況下,在機構 運轉過程中EF連線兩次通過A點,即機構在一 個運動周期中有兩次停歇。在AD較小的情況下, EF連線在機構的運轉過程中始終不通過A點 (即EF與AD的交點總是在A點的一側),那麽 在EF共線且AD有一個最小值,機構才有一次 停歇,這就是我們要尋求的答案.
本文源於網絡轉載,如有侵權,請聯係刪除
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@wzhenglide.com

微信:產品谘詢

公眾號:k8凯发版官网儀器